直流电机优化控制系统设计(二)

(7)工作电压、速度及功耗。ATmega16L:2.7-5.5V,0-8MHz,ATmega16:
4.5-5.5V,0-16MHz。ATmega16L 在1MHz,3V,25℃时功耗为:正常模式:1.1mA,
空闲模式0.35mA,掉电模式:小于1μA。
(8)DIP40 或TQFP44 封装。
3.2 AVR单片机最小系统
AVR 单片机最小系统由复位电路、晶振电路和ISP 下载下线接口及ATmega16构成。如下图3-1 所示。
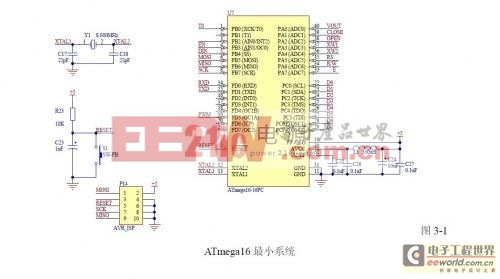
虽然AVR 单片机内部带有0-8MHz 的内部时钟,但为了系统时序稳定,工作可靠,这里采用了由8MHz 的石英晶振构成的振荡器作为单片机的系统时钟。R23、C23 和S1 构成上电复位和按键复位电路。P14 为AVR 单片机的ISP 下载接口。C27、C24,L1、C26 分别构成数字电路和内部模拟电路电源滤波电路,C25 为A/D 转换所用内部参考源的滤波电容。单片机的管脚分配如下表3-1 所示。

3.3 双极性PWM 波形产生与死区发生
3.2.1 PWM波的产生
PWM 波形由控制芯片ATmega16 的定时器T/C1 产生,从OC1A(PD5)引脚输出。ATmega16 的T/C1 是一个可编程的16 位双向的定时器/计数器,既可以在系统时钟作用下作为16 位定时器使用,也可以对T1 引脚上的脉冲进行计数,可以在OC1A 和OC1B 引脚上输出两路PWM 波形,并可在ICP 引脚上输入脉冲作用下捕捉一次TCNT1 中瞬时计数值。这里我们不详细介绍T/C1 的所有功能,只阐述其产生PWM 的波形的过程。与T/C1 有关的工作寄存器有:T/C1 计数器TCNT1、输出比较匹配寄存器OCR1A 和OCR1B 以及输入捕捉寄存器ICR1,均为16 位,由相应的8 位I/O 寄存器拼装而成;T/C1 控制寄存器TCCR1A 和TCCR1B,用于设定T/C1 的工作模式。T/C1 的工作模式由一般模式、比较匹配时清零定时器(CTC)模式以及两种PWM 等15 种。PWM 模式中,又可分为8 位、9 位、10 位PWM,其中又有快速模式和相位频率可调模式。PWM 波形位数越高,则其波形输出精度也越高,但其相应频率也越低。为使电机电流连续,PWM 波形频率不能太低。在快速PWM 模式下,TCNT1 为加“1”计数器,可以从0000H 一直加到TOP值,并在下个计数脉冲到来时清零,然后再从0000H 开始加“1”计数,并重复上述过程。相比于其他两种PWM(相位可调及相位频率可调)模式,快速PWM模式频率要高出一倍,适合功率调节、电机控制等。因此我们选择快速PWM模式。
OC1A 或OC1B 引脚上PWM 输出波形的频率由下式确定,式中的N 取值为1、8、64、254 或1024(分别代表分频系数)。

陀螺仪相关文章:陀螺仪原理











评论