交互式应用一举两得 实时仿真与嵌入式系统并构

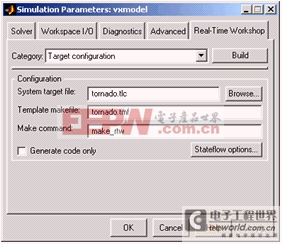
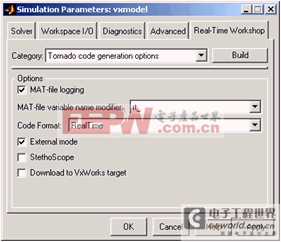
图5 仿真参数code generation options设置(2) 配置模板联编连文件tornado.tmf,该文件位于%matlabroot%/rtw/c/tornado目录下,要对这个文件作如下修改:
#------------ Macros read by make_rtw -------------
MAKECMD = C:Tornado2.2hostx86-win32 inmake
HOST = PC
#-------------Tool Locations-----------------------------
WIND_BASE= C:Tornado2.2
WIND_REGISTRY=$(COMPUTERNAME)
WIND_HOST_TYPE=x86-win32
#------------Vxworks Configuration------------------
VX_TARGET_TYPE = pentium
CPU_TYPE = PENTIUM2
#-------------Macros for Downloading to Target-----
TARGET=target
TGTSVR_HOST=host
VX_CORE_LOC = $(WIND_BASE)/target/config/ pcPentium3/vxWorks
(3) 程序的生成、编译、连接
设置完参数,保存后,开始创建程序,单击上图中的Build按钮,开始编译程序,成功后可在当前的目录中产生了一个 vxmodel_tornado_rtw的文件夹和一个目标文件vxmodel.lo。
(4) 手动下载和运行可执行文件
现在可以将实时程序下载到目标机中,具体的方法是在Tornado集成开发环境中启动WindSh,在WindSh窗口执行如下命令:
ldvxmodel.lo
请注意要保证lo文件在WindSh的工作路径下。VxWorks实时程序定义了一个函数rt_main(),用来创建和执行模型代码、完成与 Simulink的通信(如果选择了外部模式方式)。rt_main函数在文件rt_main.c中定义,这个文件位于目录%matlabroot% twc ornado中。
在WindSh窗口中调用rt_main函数,开始运行程序:sp(rt_main,vxmodel,"-tf 100 -w ","*",0,30,17725)
参数的含义分别是:
rt_main()是实时程序定义的函数,用来产生任务执行代码和与Simulink进行通信;
-tf用于指定仿真时间,此处设为100秒;
-w表示在外部模式时,运行前等待来自Simulink消息的触发;
“*”为安装所有的信号;
0表示使用各自的模块名;







评论