基于Atmel半导体方案的汽车雨刷系统的实现

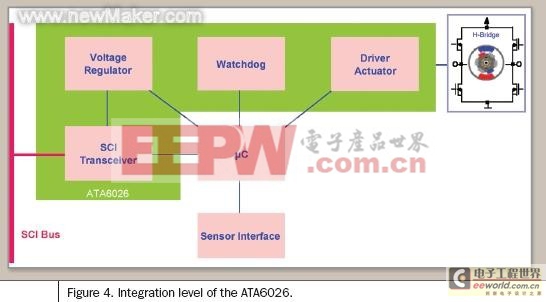
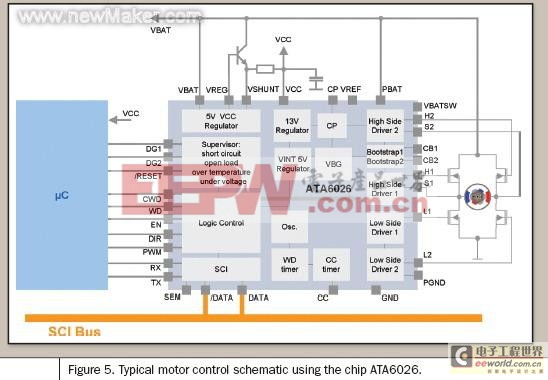
图5中的框图给出了要实现的功能和典型应用的原理图。微控制器通过提供一PWM速度信号和一方向信号来控制IC的驱动功能。因为该芯片必须驱动外部H桥的栅极,所以包含有两个推挽式驱动器,用来控制两个用作高端驱动器的外部功率NMOS FET,另外还有两个推挽式驱动器,用来控制两个用作低端驱动器的外部功率NMOS FET。驱动器可与标准或逻辑电平功率NMOS FET一起使用。高端控制驱动器使用外部自举电容器给栅极提供超过电池电压8V~14V的电压。也可以逆向控制电机。采用电荷泵给高端驱动器的栅极供电,这样在两个方向上都可能达到100%的占空比。为防止H桥出现高峰值电流,采用非重叠相位实现外部功率NMOS晶体管的切换。交叉导通时间由外部RC组合决定。
前面已经提到,ECU应用要具备休眠功能以满足低电流消耗的要求。在ATA6026的休眠模式下,可以使用引脚EN或数据唤醒IC。只有几个模块处于换醒状态(带隙、带有100 nF外部隔直电容的内部5V稳压器、检测EN引脚阈值的输入结构和SCI接收部分的唤醒模块)。上电缺省态为激活模式。为了在两个模式间变化,采用3个步骤。除激活/不激活EN引脚外,还有通过使用SCI收发器实现的第二种唤醒方法。在休眠模式下,SCI收发器部分激活并在单端模式下工作。如果用SCI去激活,则EN引脚能保持低电平,而不干扰激活模式。
由于稳压器、运动控制、看门狗和通信接口都集成在采用小型QFN封装的单芯片上,因此可降低系统总成本,同时对几乎所有种类的电机驱动应用,无需适配,输出级仍具有即插即用的灵活性。IC包含有运动控制部分,只是PWM速度信号和方向信息必须由微控制器提供。有两个诊断引脚,使故障安全功能成为可能。(end)










评论