一种无刷直流电动机控制系统设计

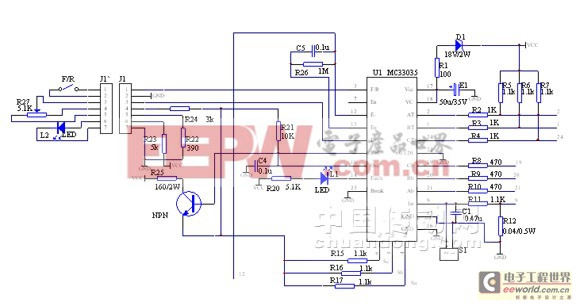
图2MC33035外围电路
如图所示,我们给电压为24V的电源,F/R控制电机转向,正向/反向输出可通过翻转定子绕组上的电压来改变电机转向。当输入状态改变时,指定的传感器输入编码将从高电平变为低电平,从而改变整流时序,以使电机改变旋转方向。
电机通/断控制可由输出使能7管脚来实现,当该管脚开路时,连接到正电源的内置上拉电阻将会启动顶部和底部驱动输出时序。而当该脚接地时,顶端驱动输出将关闭,并将底部驱动强制为低,从而使电动机停转。
由于MC33035的8管脚提供6.25V标准电压输出,因此可以用此电压给霍尔元器件以及其他器件供电,在这个系统中PWM信号的产生是很容易的,而且PWM信号的频率可以由外部电路调节,其频率由公式
14管脚是故障输出端,L1用作故障指示,当出现无效的传感器输入码、过流、欠压、芯片内部过热、使能端为低电平时,LED发光报警,同时自动封锁系统,只有故障排除后,经系统复位才能恢复正常工作。R6及C1决定了内部振荡器频率(也即PWM的调制频率),转速给定电位计W的输出经过积分环节输入MC33035的误差放大器的同相输入端,其反向输入端与输出端相连,这样,误差放大器便构成了一个单位增益电压跟随器,从而完成系统的转速控制。
8管脚接一NPN的三极管,当8脚电压为高电平时,三极管导通,为MC33039和霍耳传感器提供电压。电解电容C2是滤波作用,防止电流回流。
MC33035的17管脚的输入电压低于9.1V时,由于17脚的输入连接内部一比较器的同相输入端,该比较器的反相输入为内部一9.1V标准电压,此时MC33035通过与门将驱动下桥的三路输出全部封锁,下桥的三个功率三极管全部关断,电机停止运行,起欠压保护作用。过热保护等功能是芯片内部的电路,无需设计外围电路。
该系统的无刷直流电机内置有3个霍尔效应传感器用来检测转子位置,一旦决定电机的换相,并可以根据该信号来计算电机的转速。传感器的输出端直接接MC33035的4、5、6管脚。当电机正常运行时,通过霍尔传感器可得到3个脉宽为180度电角度的互相重叠的信号,这样就得到6个强制换相点,MC33035对3个霍尔信号进行译码,使得电机正确换相。
当MC33035的11脚接地时,电机转速为0,即可实现刹车制动。
MC330399是Motorola公司配合MC33035专门设计的无刷电机闭环速度控制器,这是一个8脚的双列直插窄式集成电路块。MC33039对输入的转子位置信号码进行有关的处理,产生一个与电机实际转速成正比的转速电压信号。
从电机转子位置检测器送来的三相位置检测信号(SA、SB、SC)一方面送入MC33035,经芯片内部译码电路结合正反转控制端、起停控制端、制动控制端、电流检测端等控制逻辑信号状态,经过运算后,产生逆变器三相上、下桥臂开关器件的六路原始控制信号,其中,三相下桥开关信号还要按无刷直流电机调速机理进行脉宽调制处理。处理后的三相下桥PWM控制信号(AB、BB、CB)及三相上桥控制信号(AT、BT、CT)经过驱动放大后,施加到逆变器的六个开关管上,使其产生出供电机正常运行所需的三相方波交流电流。另一方面,转子位置检测信号还送入MC33039,经F/V转换,得到一个频率与电机转速成正比的脉冲信号FOUT,其通过简单的阻容网络滤波后形成转速反馈信号,利用MC33035中的误差放大器即可构成一个简单的P调节器,实现电机转速的闭环控制。实际应用中,还可用外接各种PI、PID调节电路实现复杂的闭环调节控制,如图3所示。

霍尔传感器相关文章:霍尔传感器工作原理
低通滤波器相关文章:低通滤波器原理
蜂鸣器相关文章:蜂鸣器原理 霍尔传感器相关文章:霍尔传感器原理 上拉电阻相关文章:上拉电阻原理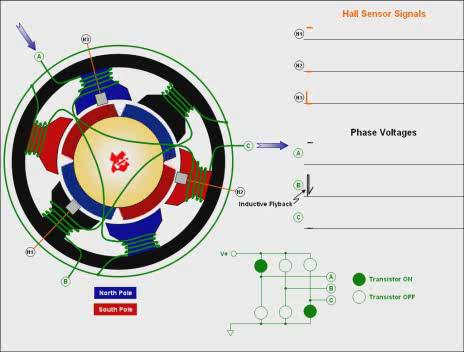



评论