频率响应法-相对稳定性分析

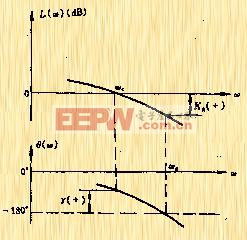 |
| 图5-52 稳定系统的Bode图 |
 |
| 图5-53 不稳定系统的Bode图 |
在Bode图上,增益裕量常用分贝数表示,即
|
上式表示系统在到达临界稳定前,允许系统增益增大的倍数。对于稳定的系统,由于![]() <1,即
<1,即![]() 为负,由式(5-56)可知,增益裕量为正,这时对数幅频特性曲线上对应
为负,由式(5-56)可知,增益裕量为正,这时对数幅频特性曲线上对应![]() 的点在
的点在![]() 轴下方,如图5-52;当系统不稳定时,相应地,可将图5-51绘制在Bode图上,如图5-53,这时相位裕量和幅值裕量均是负的。
轴下方,如图5-52;当系统不稳定时,相应地,可将图5-51绘制在Bode图上,如图5-53,这时相位裕量和幅值裕量均是负的。
增益裕量和相位裕量通常作为设计控制系统的频域性能指标。大的增益裕量和相位裕量表明控制系统是非常稳定的,但此时控制系统的响应速度将是非常慢的,而当增益裕量接近1或相位裕量接近零时,则对应一个高度振荡的系统。因此从工程的角度出发,一般控制系统设计时采用如下的裕量范围是比较合适的:![]() 在
在![]() 到
到![]() 之间,增益裕量大于6dB。
之间,增益裕量大于6dB。
同时需要指出,单独使用增益裕量或相位裕量作性能分析,都不足以说明系统的相对稳定性,必须同时给出这两个稳定裕量。对于大多数控制系统来说,这两个指标是统一的,但有时情况并非如此,图5-54a、图5-54b分别表示了这两种情况下的频率特性。
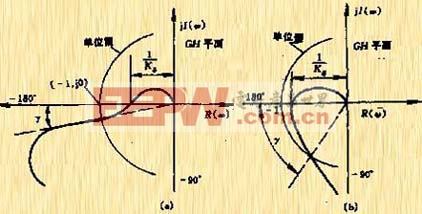 |
| 图5-54 开环控制系统的奈氏图 (a) 好的幅值裕量和差的相角裕量 (b) 好的相角裕量和差的幅值裕量 |
例5-10 试求:(1)K=1时系统的相位裕量和增益裕量。(2)要求通过增益K的调整,使系统的增益裕量![]() ,相位裕量
,相位裕量![]() 。
。
例5-10 试求:(1)K=1时系统的相位裕量和增益裕量。(2)要求通过增益K的调整,使系统的增益裕量![]() ,相位裕量
,相位裕量![]() 。
。
已知一单位反馈系统的开环传递函数为
解 (1)基于在![]() 处的开环频率特性的相角为
处的开环频率特性的相角为
即
由三角函数的性质,有
求得![]() 。
。
同时,在 ![]() 处的开环对数幅值为
处的开环对数幅值为
则
根据K=1时的开环系统传递函数,可知系统的![]() ,从而
,从而
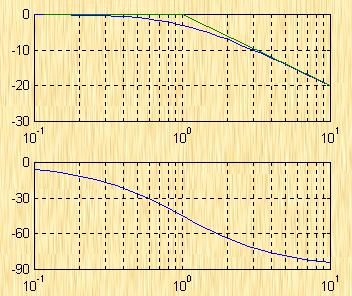
此小题也可用Matlab直接求解。
g=tf(1,conv([1,0],conv([0.2,1],[0.05,1])))
Transfer function:
1
-----------------------
0.01 s^3 + 0.25 s^2 + s
margin(g)




评论