控制系统的时域分析法--控制系统的稳态误差 | 从前面叙述可知,如果一个线性控制系统是稳定的,那么从任何初始条件开始,经过一段时间就可以认为它的过渡过程已经结束,进入与初始条件无关而仅由外作用决定的状态,即稳态。控制系统在稳态下的精度如何,这是它的一个重要的技术指标,通常用稳态下输出量的要求值与实际值之间的差来衡量。如果这个差是常数,则称为稳态误差。 控制系统的稳态误差是因输入信号不同而不同的。因此就需要规定一些典型输入信号。通过评价系统在这些典型输入信号作用下的稳态误差来衡量和比较系统的稳态性能。在控制工程中通常采用的典型输入信号有以下几种: 1.单位阶跃函数: 其拉普拉斯变换为R(s)=1/s。 2.单位斜坡函数 其拉普拉斯变换为R(s)=1/s2。 3.单位加速度函数: 其拉普拉斯变换为R(s)=1/s3。 4.单位脉冲函数 其拉普拉斯变换为R(s)=1。 5.正弦函数: 其中最常用的典型信号为单位阶跃、单位斜坡、单位加速度三种输入信号。 3.2.2稳态误差和误差传递函数 系统的稳态误差是指系统在稳定状态下其实际输出值(在实际工作中常用系统输出的测量值代替)与给定值之差。对稳定的单输入单输出系统,稳态误差是时域中衡量系统稳态响应的性能指标,它反映了系统的稳态精度,因此稳态误差分析是控制系统分析的一项基本内容。 设有如图3-1所示的系统。它的闭环传函为 误差信号e(t)和输入信号r(t)之间的传递函数是 其中误差e(t)是输入信号和反馈信号之差。 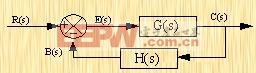 | | | 图3-1控制系统 |
终值定理为求稳定系统的稳态误差提供了一个简便的方法。因为E(s)是 则稳态误差是
3.2.3 静态误差系数 当系统的输入信号为单位阶跃、单位斜坡和单位加速度三种典型信号之一时,上式分别化为: 单输入单输出线性系统的传递函数一般表示为: 单位阶跃函数:  | (3-2) |
单位斜坡函数:  | (3-3) |
单位加速度函数:  | (3-4) |
现定义误差系数如下: 静态位置误差系数Kp:  | (3-5) |
静态速度误差系数Kv:  | (3-6) |
静态加速度误差系数Ka:  | (3-7) |
将(3-5),(3-6)及(3-7)分别代入(3-2),(3-3)及(3-4)得 单位阶跃函数:  | (3-8) |
单位斜坡函数:  | (3-9) |
单位加速度函数:  | (3-10) |
下面进一步考察误差系数与系统的结构和参数的关系。 系统开环传递函数一般写成  | (3-11) |
的形式,式中K是系统的开环比例系数。分母中的因子sυ表明开环传递函数中含有υ个积分单元。将系统按照υ=0,1,2分别将其分为0型,1型,2型。在表3-1中列出了按照式(3-2),(3-3)及(3-4)求得的系统稳态误差系数。 | 0型系统 | 1型系统 | 2型系统 | | (阶跃输入)r(t)=1(t) | | 0 | 0 | | (斜坡输入)r(t)=t/td> | ∞ | | 0 | | (加速度输入)r(t)=t2/2 | ∞ | ∞ | |
| 表3-1 0型、1型及2型系统以增益K表示的稳态误差 |
误差系数Kp、Kv和Ka描述了系统减少或消除稳态误差的能力,系数值愈大,则给定稳态误差终值愈小。一般来说,在保持瞬态响应在一个允许的范围内时,希望增加误差系数,如果在静态速度误差系数和加速
技术专区
|
|



















评论