基于超声传感技术的视觉自动识别系统

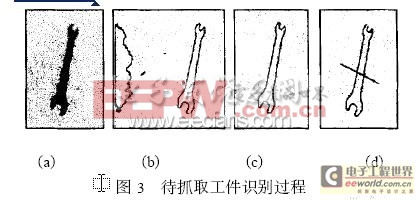
实验结果表明, 采用本文提出的将机器人手- 眼视觉与超声波测距相结合的检测装置, 以及融合二维图像信息与深度信息进行工件识别与抓取的方法,可准确对物体进行识别与定位,具有算法简单、计算量小、实时性好、可靠性高等特点,可为机器人与环境交互提供物体形状、类别及大小等信息,使机器人装配作业能适应各种复杂的环境与工艺过程,对实现工业生产过程的自动化、柔性化、智能化有良好的应用前景.
实验结果表明, 采用本文提出的将机器人手- 眼视觉与超声波测距相结合的检测装置, 以及融合二维图像信息与深度信息进行工件识别与抓取的方法,可准确对物体进行识别与定位,具有算法简单、计算量小、实时性好、可靠性高等特点,可为机器人与环境交互提供物体形状、类别及大小等信息,使机器人装配作业能适应各种复杂的环境与工艺过程,对实现工业生产过程的自动化、柔性化、智能化有良好的应用前景.

评论