利用边缘 AI 即插即用方案增强无线状态监测

在工业与汽车领域,状态监测(Condition-based Monitoring,CbM)正逐步取代传统的被动维护与周期性保养,成为降低停机风险、延长设备寿命的重要技术。然而,一个高效的 CbM 系统往往需要在精密传感、低噪声信号链、电源管理与无线通信之间实现最佳集成。这些跨学科的复杂度不仅增加开发成本,也延迟系统落地。此外,随着边缘人工智能(Edge AI)在工业监测中的应用不断增长,设计难度进一步提升。显然,需要一种更直接、高效、可快速部署的解决方案。
本文首先简要介绍 CbM 的意义和技术挑战,随后重点解析 Analog Devices 推出的即插即用无线 CbM 平台 —— Voyager 4 评估套件 EV-CBM-VOYAGER4-1Z,其支持边缘 AI 推理,可作为快速部署预测性维护的整体方案。
1. 为什么状态监测至关重要
工业系统的无计划停机事件往往直接造成产线暂停、供应链中断以及高昂的维修成本。传统的维护策略主要包括两类:
事后维护(Reactive Maintenance):设备故障后再维修,导致高额停机损失。
计划性维护(Scheduled Maintenance):按固定周期更换部件,可能造成资源浪费,因为许多部件在更换时仍处于可正常工作状态。
相比之下,状态监测通过实时采集振动、温度、电流等运行指标,识别设备劣化的早期迹象,使企业能够提前采取措施,从而:
减少非计划停机
延长设备寿命
降低总体拥有成本(TCO)
然而,要实现上述收益,CbM 设备必须在高噪声、高振动、电磁干扰和温度变化显著的工业环境下稳定运行,这对设计者构成了多学科融合的挑战。
2. 状态监测的技术挑战与系统需求
为了达到预测性维护的效果,CbM 系统必须在严苛场景中维持 高精度、低噪声、宽带宽 的测量能力。典型工业设备——如电机、传动链和大型旋转机械——在正常运行时就会施加持续的机械应力和电磁干扰。
2.1 高精度振动检测需求
振动分析是识别轴不平衡、错位、轴承磨损等早期故障的基础。因此,传感器要在复杂条件下捕捉微小振动变化,从而需要:
高带宽(kHz 级)
低噪声模拟前端
稳定的数字化采样链路
2.2 人工智能分析正向边缘迁移
过去,振动数据通常发送到主机或云端进行分析;然而当前趋势是把分析前移到设备侧,即 边缘推理(Edge AI),其优势包括:
最小化分析时延
降低网络传输压力
提升系统实时性与安全性
基于卷积神经网络(CNN)的振动模式识别能够实时检测异常,但推理过程计算量大,要求设备在功耗、尺寸和成本有限的条件下保持高性能。
2.3 无线通信与功耗限制
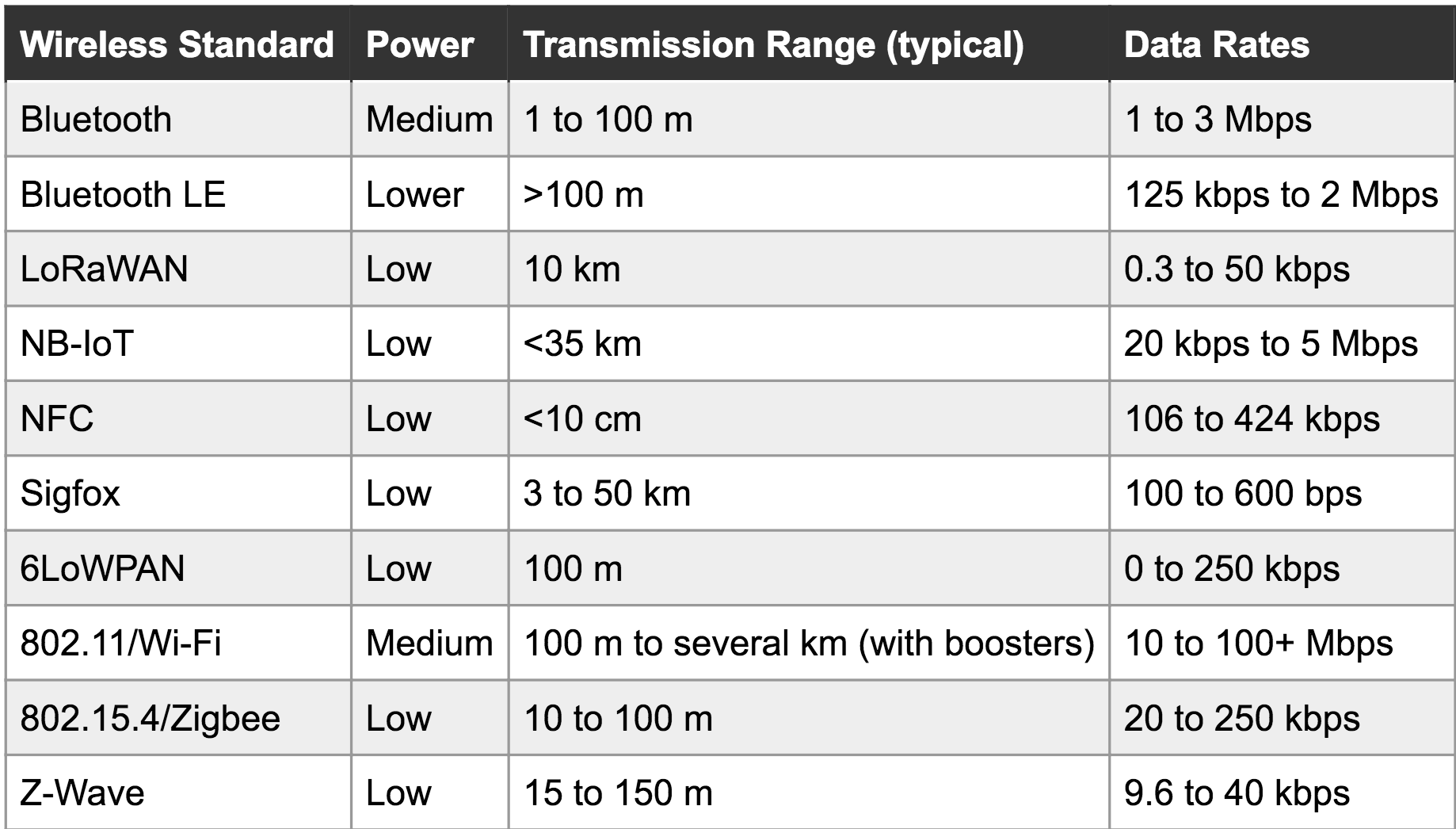
无线 CbM 在旋转机械、远程设备和无法布线的应用中尤为重要。BLE(Bluetooth Low Energy)在多项指标上成为理想选择(见表 1)。
 4
4

表 1:常见无线标准在 CbM 应用中的关键性能比较(来源:Analog Devices)
| 标准 | 典型范围 | 功耗 | 可靠性 | 抗干扰性 | TCO | MESH | 安全性 |
|---|---|---|---|---|---|---|---|
| Wi-Fi | 100 m | 高 | 低(单 RF 信道) | 低 | 高 | 是 | WPA |
| BLE | 20–100 m | 低/中 | 中/高 | 低 | 中 | 是 | AES |
| Zigbee/Thread | 20–200 m | 低/中 | 低 | 低 | 中 | 是 | AES |
| Smart-MESH | 20–200 m | 低 | 高 | 高 | 低 | 是 | AES |
| LoRaWAN | 500–3000 m | 中 | 低 | 低 | 高 | 否 | AES |
然而,实现 BLE 的低功耗仍然困难,尤其对边缘 AI 推理任务而言,必须将电源管理与无线收发的功耗控制到极低水平。
3. Voyager 4:支持边缘 AI 的无线状态监测即插即用方案
为应对上述挑战,Analog Devices 推出 EV-CBM-VOYAGER4-1Z(Voyager 4) —— 一个集成传感、处理、功耗优化与无线通信的完整电池供电振动监测平台,可用于 CbM 技术评估或直接部署预测性维护。


 4
4
如图 1 所示,该套件采用 垂直支架结构,使主板和电池稳固安装;传感器和电源板位于支架底部,靠近振源。最终部署时,整体结构装入直径 46 mm、高 77 mm 的铝制外壳中,顶部采用 ABS 盖以确保 BLE 信号畅通。
4. 模块化架构:传感、处理与无线通信协同设计
Voyager 4 由两颗低功耗 MCU 组成:
MAX32666:BLE MCU,负责无线连接、系统控制与数据转发
MAX78000EXG+:AI MCU,内置 CNN 加速器,用于本地推理
配合多款低功耗模拟与电源器件形成整体系统,如图 2 所示。



4.1 高带宽振动传感链路
主振动传感器为 ADXL382-1BCCZ-RL7:
三轴 MEMS 结构
16 位 ADC
8 kHz 带宽
功耗:高性能模式 520 μA(8 kHz)、低功耗模式 32 μA(400 Hz)
ADXL382 输出由 ADG1634B CMOS 开关切换至不同子系统,由 MAX32666 协调。
Voyager 4 同时使用 ADXL367BCCZ-RL7 作为超低功耗“唤醒加速度计”,其在运动触发模式下电流仅 180 nA。
4.2 训练模式与推理模式
系统具有两种典型运行路径(见图 3):

训练模式(路径 a)
MAX32666 读取 ADXL382 的原始振动数据
通过 BLE 或 USB 传输至用户主机
用于构建自定义 CNN 推理模型
推理模式(路径 b)
MAX78000EXG+ 直接读取 ADXL382 原始数据
使用 CNN 加速器执行异常识别
若检测到异常,向 MAX32666 发出告警并上报
若无异常 → 系统进入低功耗休眠,由 ADXL367 负责触发下一周期
这一架构使 BLE 收发器仅在训练阶段与异常上报时工作,显著降低功耗。
5. 超低功耗设计:系统与器件双层优化


Voyager 4 采用多级节能设计:
5.1 系统级
运动激活唤醒机制
按需启动 BLE
睡眠期间仅 ADXL367 处于 180 nA 模式
每小时运行一次检测时,系统平均功耗约 0.3 mW
使用 1500 mAh 电池时可达到 约两年寿命
训练模式因频繁使用 BLE 功耗较高(约 0.65 mW)。
5.2 器件级
MAX32666:执行缓存运行时 27.3 μA/MHz @ 3.3 V
MAX78000EXG+:M4 核心循环执行 22.2 μA/MHz @ 3.0 V
两者均带动态电压调节(DVS)
MAX20335 PMIC 提供电源管理
MAX17262 负责电池电流监测与寿命估算
这些设计确保系统即使在执行 CNN 推理时仍保持极低功耗。
6. 边缘 AI 模型的训练与部署流程
在资源受限的 MCU 上执行 CNN 推理,需要专门的模型优化流程。Analog Devices 在 GitHub 上提供完整的工具链与示例,涵盖训练、综合与固件集成三大阶段(图 5)。


阶段 1:模型训练(ai8x-training)
设置 Python 环境
使用 train.py 脚本执行 CNN 模型训练
提供大量教程帮助开发者理解模型与硬件资源之间的匹配关系
阶段 2:模型综合(ai8x-synthesis)
将训练好的模型转换为 C 语言
针对 MAX78000EXG+ 的 CNN 硬件结构进行优化
阶段 3:固件开发与部署(SDK)
将模型嵌入 AI MCU 固件
通过 USB 或 BLE 更新至 Voyager 4
Windows 主机端 Python GUI 可发送指令与查看推理状态
当进入正常运行模式时,MAX78000EXG+ 在每次唤醒后自动执行推理,实现完全本地化的振动异常监测。
7. 结语
设备故障导致的非计划停机给制造与运营带来显著风险,而状态监测是实现预测性维护的核心技术。然而,设计一个同时具备无线通信、精密传感、低功耗管理及边缘 AI 分析的 CbM 系统仍是一个复杂工程。
Analog Devices 的 Voyager 4 无线振动评估套件为开发者提供了一个可直接部署的解决方案,涵盖:
高带宽 MEMS 振动采集
超低功耗运行机制
BLE 无线通信
本地 CNN 加速与异常检测
完整的边缘 AI 模型训练与部署流程
它使企业能够更快速地构建预测性维护系统,大幅降低 CbM 部署门槛,加速工业设备智能化进程。




评论