控制系统中负反馈的数学原理是什么,如何用它来确保稳定性?

负反馈可以创建一个控制系统,其中过程的输出用于抵消与所需设定点的任何偏差,有效地“纠正”系统,使其恢复平衡,并保持稳定运行。它用于各种应用,包括电压调节、温度控制器、音频放大器和运算放大器。
本文引用地址:https://www.eepw.com.cn/article/202506/471672.htm本文简要概述了在简单稳压器和更复杂的比例积分微分 (PID) 工业控制器中实现负反馈所涉及的数学运算,包括如何使用波特图和奈奎斯特准则分析稳定性。
在负反馈回路中,反馈信号与输入信号异相,有效地抵消了输入信号本来会做出的任何变化。这与正反馈回路形成鲜明对比,在正反馈回路中,反馈信号与输入信号同相并加强变化。
简单控制系统和放大器的基本负反馈涉及一个反馈回路,其中输出信号的一部分从输入中减去。反馈环路增益 (A) 定义为 A = A₀/(1 + βA₀),其中 A₀ 是没有任何反馈的开环增益,β 是反馈因数,表示发送回输入端的输出信号量。
在开关模式稳压器的情况下,反馈用于调制占空比和控制输出电压。图 1 说明了开关模式调制的基本原理。将反馈信号与误差放大器中的参考电压进行比较。接下来,将误差放大器输出与斜坡电压进行比较,以控制开关时间。
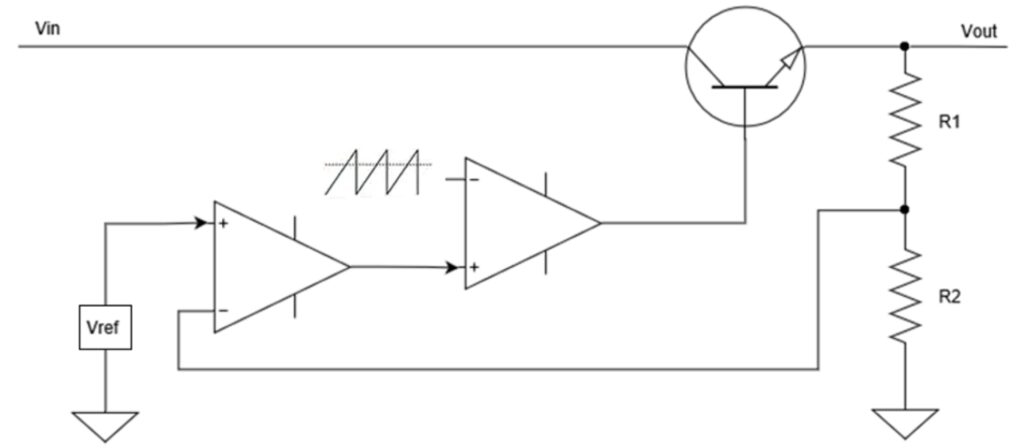
图 1.开关稳压器控制环路使用分压器提供反馈信号。(图片:Cadence)
PID 控制器可以在动态系统中提供稳健稳定的运行。它们也采用负反馈,但反馈计算更复杂,包括三个项,所有这些项都基于误差信号。

比例项只是将电流误差乘以常数 Kp.
积分项将累积误差乘以常数 K我.
导数项将误差的变化率乘以常数 Kd.
反馈回路的输出 u(t),也称为 e 或总误差因子,被馈送到 PID 控制器中,以产生当前周期的控制信号 u(图 2)。

图 2.PID 控制系统和反馈回路的框图。(图片:Crystal Instruments))
在复杂或高性能的控制应用中,环路内的相移会导致运行不稳定。
波特图和稳定性
体图和奈奎斯特稳定性准则适用于简单的负反馈系统,例如具有单个控制参数的稳压器和具有多个控制参数的复杂工业 PID 控制器。
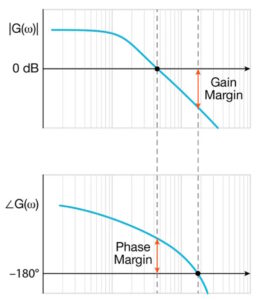
图 3.波特图可用于直观地比较增益和相位裕量。(图片:泰克))
在波特图中,反馈回路的增益和相位在纵轴上绘制,与频率在横轴上绘制。设计人员使用波特图来确定增益裕量,它表示达到不稳定性所需的增益量,以及相位裕量,它表示达到不稳定性所需的相移量(图 3)。
当相移接近 -180° 时,环路具有正增益 ≥ 1,并且可能会变得不稳定。波特图为设计人员提供了一种简单的方法来查看系统与该不良条件的接近程度。此外,通过对稳压器施加突然的负载变化并观察输出电压响应,设计人员可以评估动态条件下的环路稳定性。
奈奎斯特
奈奎斯特准则是稳定性分析的另一种工具。与分别显示幅度和相位与频率的波特图不同,奈奎斯特图将它们组合成一个复平面表示。

图 4.稳定反馈系统的奈奎斯特图示例。(图片:IEEE Open Journal of Power Electronics)
这是一种用于分析开环传递函数频率响应的图形技术,利用拉普拉斯变换将时域中的积分和导数转换为 s 域中的简单乘法和除法(图 4)。
总结
本文介绍了负反馈的数学原理,应用于各种系统,包括稳压器、温度控制器和复杂的工业过程。它还考虑了如何使用波特图和奈奎斯特准则来分析反馈和控制系统的稳定性。


评论