基于1553B总线的航天大功率电动舵机控制器设计

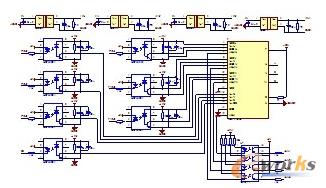

图3IPM功率驱动模块电路连接图
转子位置检测电路
转子位置及转速检测采用旋转变压器与解码芯片组合方案。采用多摩川TS2620N21E11旋转变压器,入力电压AC7Vrms10KHz,变压比0.5±5%,误差精度最大±10′。解码芯片选用飞博尔的12位分辨率旋转变压器——角位速度数字转换器FB9412PB,该转换器具有10kHz激励电源输出,直接将旋转变压器输出的正余弦模拟信号转换为角度和速度数字信号,并以并行口方式输出,数据分辨率为5.3′,精度达到±7.8′,最大跟踪速度1000rps。FB9412PB与旋转变压器的端子连接如表1所示。

电流检测电路
采用LEM的HMS20-P霍尔电流传感器检测相电流,测量范围±60A,输出电压范围2.5V±(0.625×/20)V,响应时间小于5us。电路原理如图所示,将LEM的输出Vout和参考输出Vref经过集成运放OP27以3:4比例缩小后接入DSP的ADCINA0和ADCINB0端,两者相减可以减小温度影响以及测量误差。
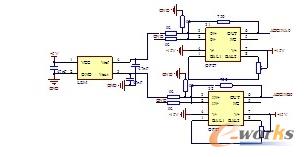
图4 LEM电流检测电路连接图
偏角检测电路
电动舵机通过传动齿轮箱和滚珠丝缸将无刷直流电机的旋转运动转换为直线运动,推动喷管摆动,通过测量滚珠丝缸的位移量就可以确定喷管摆动角,选用德国海德汉公司生产的EQN425多圈绝对值编码器,转数为4096,每转位置数8192(13bits),计算时间0.5us,精度为,编码类型为格雷码,输出信号为同步串行信号(SSI)。SSI接口转并口模块选用SSI208P,该模块自动将同步串行接口信号(SSI)转换成8位并口数据,数据更新率大于100KHZ。
限位保护电路
最大限位保护电路通过安装在电机丝缸正反向最大行程处的限位开关实现,选用海立Z15G1微动开关。当丝缸运动到最大行程处时,对应开关接通,故障信号传递给DSP芯片中断口,直接关断六路PWM。
3 软件设计
控制系统软件设计主要包括两部分内容:DSP主控程序设计和FPGA逻辑控制程序设计。DSP程序采用C语言编写,通过CCS3.3编译。FPGA采用Verilog语言编写,通过QuartusⅡ编译。

评论