基于CAN总线的无刷直流电动机模糊自适应PID控制器设计

本文引用地址:https://www.eepw.com.cn/article/201612/331547.htm
4 软件实现
主要程序流程图如图11所示。


5 实验结果及分析
电动机主要参数如下:额定功率PN=22 kW,磁极对数p=25,定子相绕组电阻为R=0.347 ,电感为L=0.03H,额定转速为nref=180 r/min,转动惯量为J=5.636 65 kgm2。
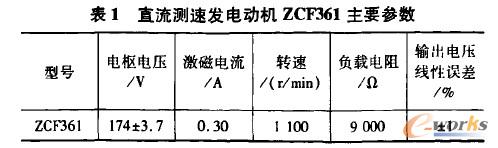
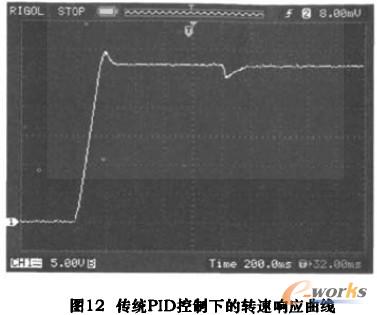
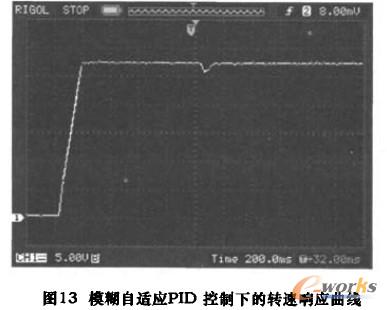
实验中对BLDCM调速系统分别采用传统PID控制和模糊自适应PID控制。系统空载起动进入稳态后,在t=2.0s时突加800 N·nl的负载。为了直观地反映速度,实验中安装了直流测速发电动机ZCF361,其主要参数如表1。传统PID控制系统和模糊自适应PID控制的转速响应曲线如图12、13所示。
对比实验结果可知,使用模糊自适应PID控制,系统无超调,能很快进入稳定状态;并且在突加负载时,使用模糊自适应PID控制,转速能够很快地恢复到平衡状态,系统具有较强的抗干扰能力。结果表明应用模糊自适应PID的控制系统具有更好的鲁棒性。
6 结语
针对无刷直流电动机调速系统性能的要求,设计了基于CAN总线的无刷直流电动机模糊控制器。并通过实验证明,此系统通过集中管理与分散控制很好地实现了多台直流无刷电动机间快速协调控制的同时,模糊自适应PID控制技术提高了系统的鲁棒性,收到了满意的控制效果。

评论