基于CAN总线的无刷直流电动机模糊自适应PID控制器设计

永磁无刷直流电动机具有交流电动机结构简单、运行可靠、维护方便,且具有直流电动机良好的调速性能而无机械换向器等优点在国民经济各个领域中得到广泛应用。故多直流无刷电动机协调控制的分布式系统具有广阔的前景。
本文引用地址:https://www.eepw.com.cn/article/201612/331547.htm但由于无刷直流电动机控制系统存在不同程度的非线性、时变性、换向效应等不确定性,影响了伺服系统的性能。因此,普通PI控制器难以获得满意的控制效果,从而限制了无刷直流电动机的使用。
本文提出一种电流环采用经典PI而速度环采用模糊自适应PID控制方法,并设计了以PICl8F458为中央处理器的基于CAN总线技术的无刷直流电动机模糊自适应控制器。实验结果表明,此系统通过集中管理与分散控制很好地实现了多台直流无刷电动机间快速协调控制,同时也通过模糊控制策略减小跟踪误差,提高了系统的鲁棒性。
1 电动机运行模式选择
无刷直流电动机的电枢绕组分Y绕组和△绕组两类,换相方式一般也有桥式和半桥式之分。常见的
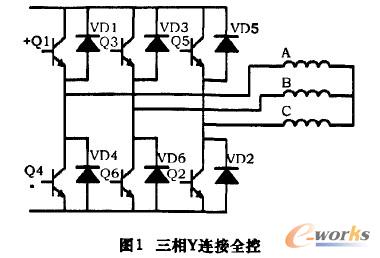
主驱动类型有:三相半控、三相Y连接全控、三相△连接全控。其中三相半控电路的特点是简单,但电动机本体的利用率很低,而且在运行过程中转矩波动较大;而三相△形连接全控电路在生产实践中应用又较少。故一般采用三相Y连接全控模式,其又分两两导通模式和三三导通模式。
三三导通模式绕组利用率高,各相绕组在每一时刻都有电流通过,正向和反向电流各1/2时间,转矩波动较大,绕组利用率高于两两导通模式;但合成电磁转矩比两两导通模式小,且易出现桥臂短路危险。
经综合评定确定电动机运行于三相Y连接全控模式的“两相导通三相六状态”,如图1。

2 控制策略与控制方法选择
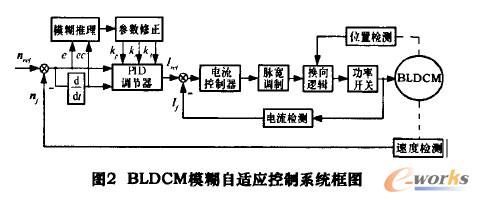
根据系统所要实现的功能,选择恰当的控制方案。本系统所采用的模糊自适应PID控制算法的转速PWM控制器的系统结构主要由模糊控制和参数可调PID系统两部分构成。这样,当负载发生变化或有不确定性的干扰时就能够迅速做出有效的判断,并予以克服。其控制系统框图如图2所示。
3 控制器硬件实现
在根据控制结构与控制方法选择主控制芯片,并根据实际要求将控制系统划分为12个单元,分别为:PIC控制器单元;按键与显示控制单元;CAN总线通讯单元;电流检测单元;电压检测单元;报警单元;逻辑换相与保护单元;驱动电路;逆变电路;泄放单元;转子位置检测单元;BLDCM调速系统本体单元。下面就其主要单元硬件设计进行简要描述。
3.1 CAN总线通讯单元
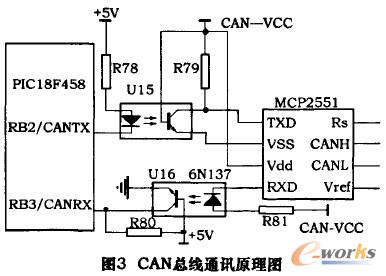
与其它总线相比,CAN总线具有成本低,开发应用方便的优点,易于采用现有的开发工具进行开发。它主要被广泛应用在抗干扰和实时通讯能力要求较高的小型网络。基于CAN总线的特点,系统采用其作为上位机与下位机的通信方式。系统采用MCP2551芯片,其为高性能CAN总线收发器。电路如图3所示。
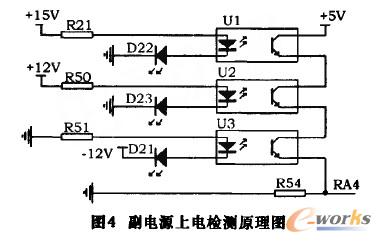
3.2副电源上电检测单元(图4)
此部分的作用是检测控制电路是否上电正常。如果+15 V,+12 V,-12 V全部供电正常,PIC的RA4端口为高电平,表明主电路可以上电;否则,系统显示副电源供电不正常,主电路不上电。
3.3主电路控制单元(图5)
此部分的作用是在副电源供电正常时,PIC的引脚RCO输出1,主电路通过继电器上电。当系统出现故障时,RCO输出0,关断主电路。

评论