台达总线型运动控制器10MC在16头高速绕线机上的应用

假设:骨架长度为L、漆包线线径为R、每层绕线圈数为N,则N=L/R。
凸轮曲线如图4和图5所示。

图4 绕线轴凸轮表

图5 旋转轴凸轮表
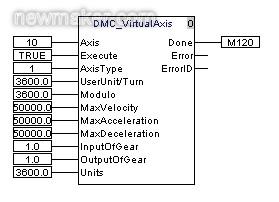
图6 虚轴的建立
图7 绕线功能的MC运动程序
图8 绕线过程中暂停和重启的MC运动程序
启动时,使用MC_Power使能伺服驱动器,然后再用它的完成未去使能绝对位移指令,那么伺服会从暂停的位置开始,重新跑完未完成的距离。
1.4缠脚功能的实现
在绕线开始时和绕线结束后,要把漆包线缠绕在相应骨架的Pin脚上,那么就需要进行缠脚的动作,此功能也是通过电子凸轮来实现,首先建立一个虚轴,让这个虚轴作为主轴,以X,Y,Z三个实轴作为从轴,从轴与主轴之间通过凸轮表建立相应关系,主轴运动时,从轴跟随主轴做相关动作。
缠脚的模式分为两种,一种是以Z轴为缠绕轴,以X,Y轴作为平面轴进行缠脚;一种是以X轴作为缠绕轴,以Y,Z轴作为平面轴进行缠脚,缠脚的框图如图9所示。
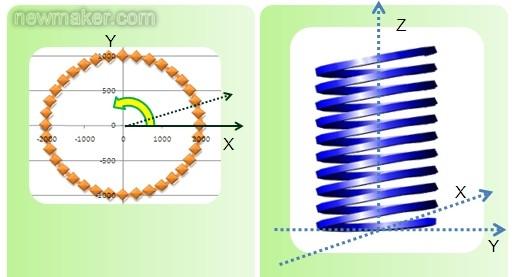
图9 缠脚框图

评论