嵌入式领域中电机控制应用的可编程片上系统(PSoC)

旋转编码器是一种非常简单的电磁器件,其能为轴上的每一步旋转生成适当的脉冲。可将其归为两类:绝对编码器和增量编码器。
(Ⅰ) 绝对编码器
绝对编码器可为电机轴的每个位置提供固定输出。例如,如果编码器能检测0度(固定)、45度、90度、135度、180度、225度、270度、315度角的轴位置(共8个位置 - 45度的分辨率),则可为每个位置分配一个3位值,如从000到111。
(Ⅱ) 增量编码器
就增量编码器而言,仅能确定电机的相对位置(即仅能确定相对于上一个位置的转动方向和角度)。增量编码器给出A和B两个信号,它们在不转动的情况下都具有默认值,假设为逻辑0和逻辑1。在轴上出现较小角度的旋转时,信号A和B都会在短时期内转换为其它逻辑,随后又返回默认值。根据旋转方向,A会转到B或B会转到A。对于每次这种旋转来说,信号A和B都会发生这种转变。图4同时给出了顺时针和逆时针旋转情况下信号A和B的转变情况。
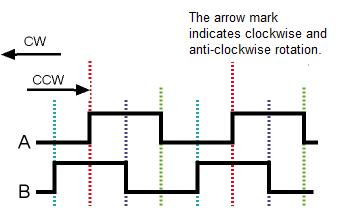
图4:信号A和B的转变
此外,旋转编码器还可根据使用的工作原理做进一步细分,包括:
(Ⅰ) 机械编码器:相继趋近接触金属接地(逻辑0)时信号A和B发生转变;
(Ⅱ) 磁性编码器:转子随轴转动,在此情况下南北两极间距一致且互变。传感器根据通量线路的方向检测位置的微量偏移和转动方向;
(Ⅲ) 光学编码器:发光二极管的光束通过连接在轴上且有透明和不透明部分的圆盘。两个光检测器(传感器A和B)检测到光束,随后生成正交相位脉冲A和B。
图5显示了机械编码器示例。

图5:机械旋转编码器
速度测量设备
目前,转速表被广泛用于测量电机的转速。可将电机的轴连接到类似于DC生成器的转速表(即,用机械能生成电能)上,其输出的DC电压与电机转速成正比。转速表生成的电压可用于实现进一步处理。
如今,众多设计人员都纷纷转而采用旋转编码器,每次转动生成数字输出。另外,这不会像转速表那样出现磨损问题。将旋转编码器的输出馈送给微控制器,就能直接监控以旋转编码器作为传感器的电机转速。
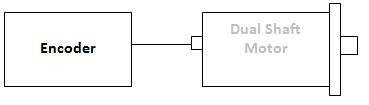
图6:通过接口将旋转编码器与DC电机相连
运动控制器模块
我们在系统中需要一个运动控制器模块来比较参考速度和实际速度,并将误差信号馈送回电机。由于上述旋转编码器返回两个正交相位信号A和B,我们需要实施可对信号解码的逻辑,从而感应电机的电流速度。通过计算传感速度和实际速度之差,我们就能向电机馈送校正因数,从而获得所需的速度。由于控制到电机的电源能控制其转速,因而馈送的校正因数需要就给定的供电电压实现适当的电压校正。
我们将在以下章节详细介绍PSoC3/5作为运动控制器的速度控制应用。PSoC是一种名符其实的可编程嵌入式片上系统,其在单颗芯片上高度集成了可配置的模拟与数字外设功能、存储器和微控制器。其采用的极度灵活的视觉嵌入式设计方法包含预配置的用户定义外设和层级原理图条目等元素。其它特性还包括高精度可编程模拟模块,如12到20位Δ-ΣADC、带几十种插入式外设的数字逻辑库、业界最佳的电源管理以及适用于电机控制应用的丰富连接资源等。
如何应用可实现电机控制的旋转编码器
既然我们已经了解了电机和旋转编码器的使用和工作原理,下面我们将讨论三种器件如何在实际应用中实现彼此互连。如果我们要对旋转编码器的信号进行解码并实施进一步处理,那么通常情况下我们必须在正常的微控制器中采用中断例程,并在中断例程过程中避免执行其它功能。若采用PSoC 3和5等可编程片上系统器件,微控制器就会有单独的数字模块/硬件模块来解码正交相位信号(A和B),并存储电流计数值,即自动递增和递减。
在反馈环路中,如果我们通过电机适配器将电机轴(速度待测)和旋转编码器的轴(这可能给电机造成负载)连接,那么编码器轴的转速就会与电机相同。编码器的输出可馈送给PSoC 3/5中的正交解码器模块做进一步处理,从而全面实现典型的电机控制系统。
电机控制应用示例
在与电机相关的应用中,“测速”是常见的要求之一。如前所述,可在解码器模块中存储电流计数值。由于电机的速度通常是根据每分钟的旋转次数来测量的,因而我们可通过每分钟对计数值进行测量来测得电机速度。例如,在每一分钟后,我们都能重设计数值,也能使用计数值差额进行计算。事实上,不用等待每分钟都做计算,我们可测量每秒钟的计数值并乘以60,但这种方法的准确度会低于每分钟测量到的情况。那么,电机的速度计算如下:

例如,我们假定步进电机的速度需保持在6000rpm上。就开环系统而言,我们可让控制器向步进电机输出方波信号,让它保持一个方向的转速为6000rpm。但是,如果我们为电机添加负载,电机的速度就会低于它应有的实际值,从而造成我们无法实现所需的速度,而且还没办法做出调整。

评论