嵌入式领域中电机控制应用的可编程片上系统(PSoC)

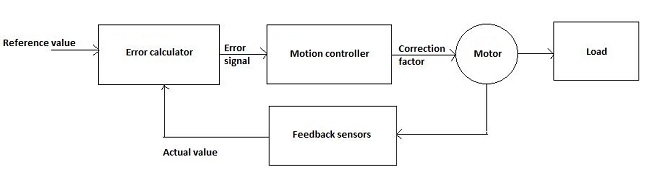
图1:控制电机速度的闭环系统
一般说来,可将电机控制系统分为各种不同的子系统,如速度、位置或方向控制系统等。我们首先看一下构造简单的速度控制系统,其电机采用常量电压(V)。在默认情况下,电机在特定的供电电压(V)下具有特定的转速(x)。如果向电机施加相同电压(V)的负载,那么其转速可能下降(y)。这样,我们就不能控制电机的速度,也就是说不能确保转速不受任何外部因素的影响。这是一种开环系统,因而我们要采取一定的反馈机制,以便能感应电机的速度并对有关因素进行补偿。
图1显示了闭环电机控制系统。这里,运动控制器将来自反馈系统的信号与实际输入进行比较,以获得误差信号,然后将其放大后提供给电机。在此系统中,向电机馈送校正因数的“运动控制器”和“放大器”模块可一起由混合信号控制器实现,而光学转动编码器则作为传感器,因为我们能通过控制器轻松对该组件的输出信号进行解码。下文将对上述各个系统的模块做进一步地阐述。
DC和步进电机简介
电机就是可将电能转换为机械能的设备。下列给出了不同领域常用的一些电机类型:
(Ⅰ) DC电机:最简单的DC电机就是在轴上加线圈绕组,固定永磁铁(见图2)。在将电压(V)施加给线圈时,电流(i)通过线圈。由于已有磁场(B),会有力(F)作用在线圈上(弗莱明右手法则)使其转动。
一旦线圈达到永磁铁的磁极之一,就会受到斥力并向另一磁极运动,从而形成持续转动,速度由所施加的DC电压决定。
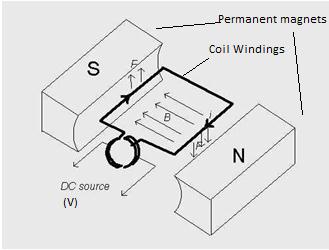
图2:DC电机的工作原理
(Ⅱ) 步进电机:永磁步进电机由永磁转子、线圈绕组和磁传导定子组成。
为线圈绕组施加电压会产生电磁场,出现南北极。定子承载着磁场。通过顺序通电或“步进”定子线圈,能改变磁场,进而生成旋转运动。图2描述了双相电机的工作情况。在第一步中,为双相定子的A相施加电压,就会将转子磁锁在如图所示的位置,这是因为异性相吸;在第二步中,关闭A相打开B相,让转子顺时针旋转90度;在第三步中,B相打开,极性与第一步相反,又产生90度旋转;在第四步中,A相关闭,B相打开,极性与第二步相反。重复上述序列会让转子每次以90度步进顺时针旋转。
在步进电机中,电机旋转的速度取决于第一步到第四步的执行速度。
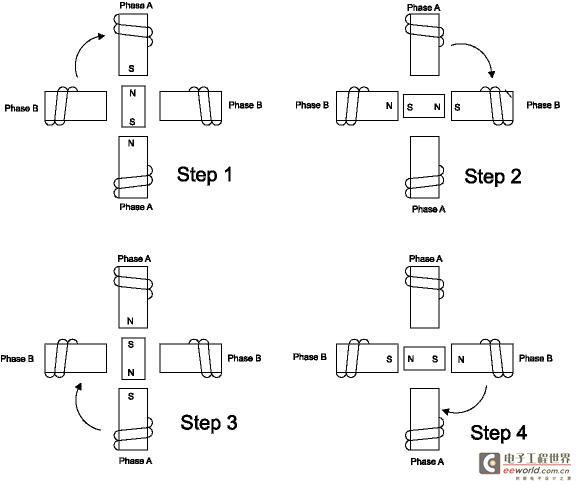
图3:步进电机的工作原理
旋转编码器简介及其分类
电机控制系统的下一个部分就是能感应电机状态并将状态馈送回控制器的反馈传感器。如前所述,旋转编码器可发挥反馈传感器的作用。

评论