2016 深度学习机器人领域最新应用及趋势总结

编者按:深度学习在机器人领域还仅仅处于起步阶段,而将来深度学习在机器人领域中的应用对发展通用人工智能大有助益。
OliverBrock将机器人技术里的深度学习现状和炼金术相比,每个人都有自己设计架构的黑魔法,而这是一个值得全领域从业者注意的问题。Brock呼吁要建立起机器人技术的“元素周期表”,研究者应该注意并且在论文中强调自己使用的方法对解决其他领域问题的适用性。
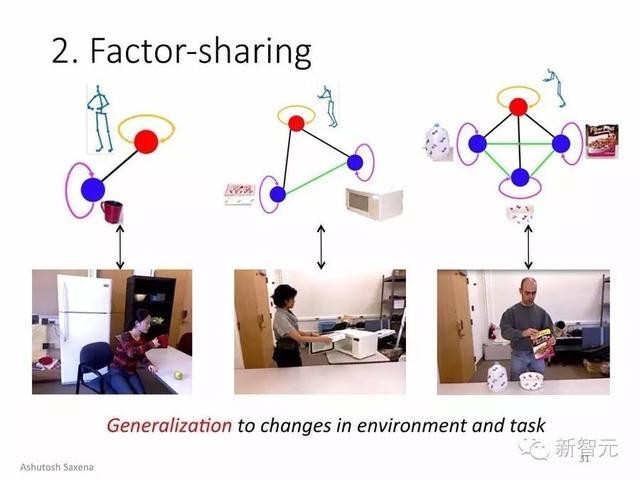
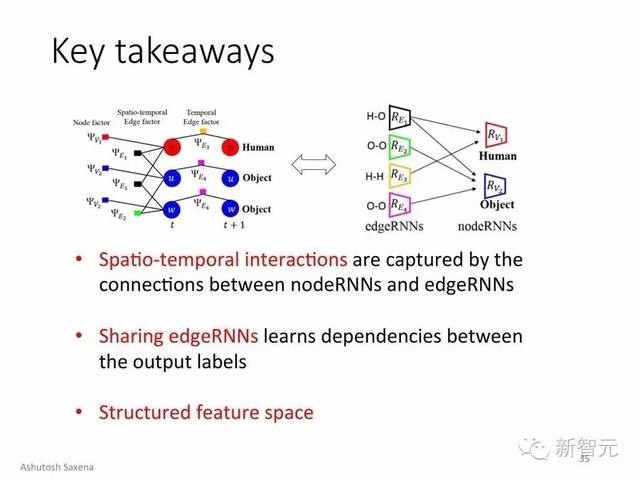
本文引用地址:https://www.eepw.com.cn/article/201608/295483.htmAshutosh Saxena的观点是,机器人应用场景中的深度学习问题就像一个因子图,每个因子都是一个经过训练的RNN。Saxena认为,形成这样一个主因子图结构,同一个机器人不同时间的子任务和不同机器人之间就都能共享组件
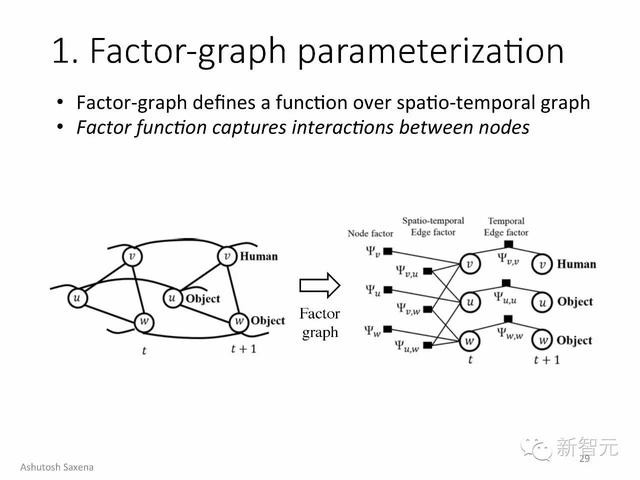
。
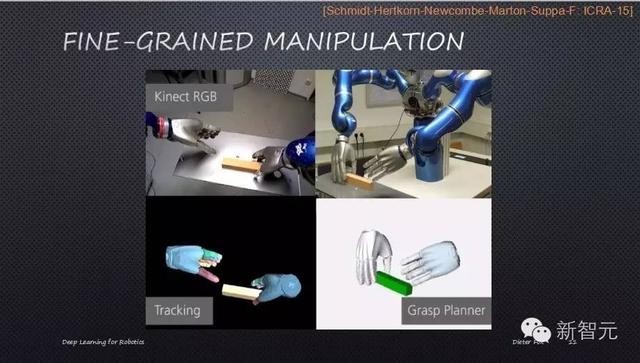
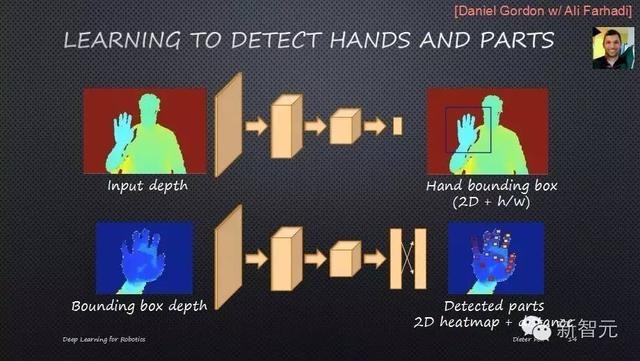
Dieter Fox主张将深度框架和先验模型相结合。Fox表示他以前对深度学习抱有怀疑,但如今已经是深度学习的积极拥护者,其原因是深度学习技术在机械手的姿态估计中的鲁棒性。Fox表示,纯粹基于模型的方法虽然能得到明确的置信区间,但在实际应用中很难达到这一点。他以ICP要求为例,至少用CNN做单帧手势跟踪鲁棒性非常好。
John Leonard一开始说自己是深度学习怀疑论者,但5个月前他看到了LarryJackel做的英伟达自动驾驶有关项目,然后改变态度,认为“让那些不用深度学习的人自生自灭就好了”。Jackel使用的是特斯拉收集的数据,包含摄像头和传感器记录的上亿英里的驾驶训练数据。Leonard还介绍了深度学习在机器人传统概率推理中的应用及未来潜力。











评论