某新型火炮随动系统的性能测试系统设计

2.2 CAN总线通信接口电路
内置于LF2407A的CAN总线控制器可以用来完成CAN总线通信协议CAN2.0B的物理层和数据链路层的全部功能。LF2407A的CAN控制器是一个16位的外设模块,具有以下特性:提供6个邮箱对象,其数据长度为O~8个字节;针对邮箱O、l和2、3有局域接收屏蔽寄存器;可编程波特率;可编程中断配置;可编程的CAN总线唤醒功能;总线错误诊断功能;自测试模式。
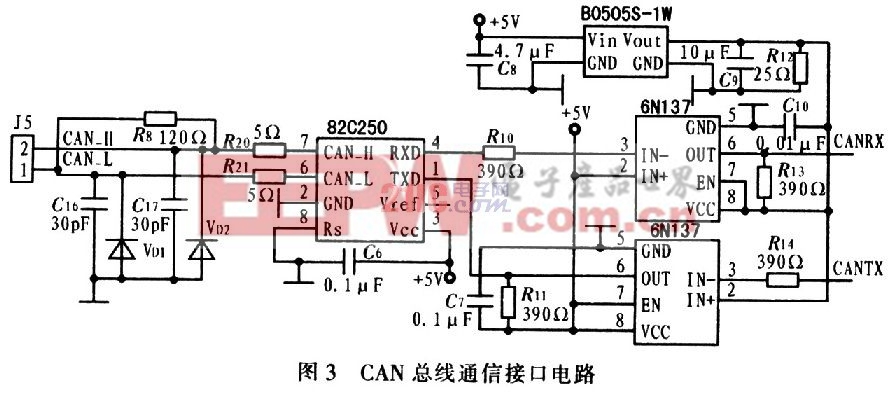
CAN总线通信的硬件电路如图3所示。为了进一步提高系统的抗干扰能力并保护DSP器件,在LF2407A控制器和收发器PCA82C250之间增加了由高速光电隔离器6N137构成的隔离电路,实现了总线上各节点间的电气隔离。光耦部分电路所采用的两个电源必须完全隔离,故电源模块采用B0505S-lW现场总线专用的电源模块。PCA82C250通过引脚8与地直接相连,采用高速方式,因此系统用屏蔽双绞线进行数据传输,30 m以内可以提供1 Mb/s的传送速率,且必须在双绞线两端连接两个120 Ω的匹配电阻来消除长线反射所引起的干扰。
3 测试系统应用软件设计
3.1 软件总体设计
TMS320LF2407A的软件设计和调试是在DSP集成开发环境CCS2000下进行的,采用C语言和汇编语言相结合的方式编写,在软件功能调试完成后,就可以将程序固化在片内的Flash内,在上电时加载程序。
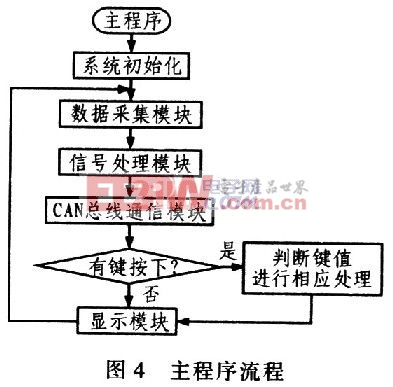
系统软件设计的主要流程如图4所示,首先系统程序进行初始化,启动DSP定时器和捕获单元,采集转速传感器输出的信号,然后对采集数据进行处理分析,DSP与CAN控制器之间以响应中断方式实现通讯。经过数据处理后的数据送给LCD显示,以对数据进行保存和分析,并扫描有效按键,判断键值,并进入相应的处理。
3.2 数据采集模块
霍尔式传感器输出的转速信号为脉冲信号,则对脉冲信号的频率进行测量即可测出转速的大小。利用LF2407A器件上的事件管理器(Event Manager)模块带有的通用定时器和捕获单元可完成计数和测量计算任务。






评论