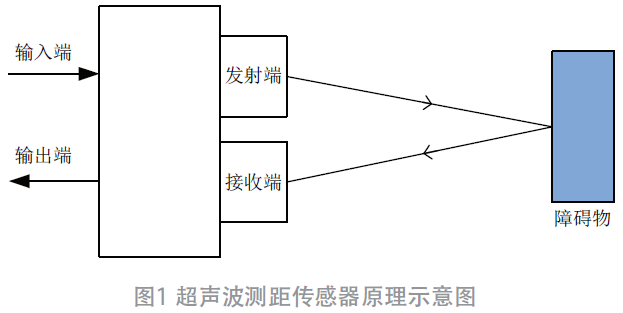
基于超声波测距的倒车雷达系统设计

超声波接收电路的需要考虑以下几个方面:
(1)环境噪声、干扰、温度等影响
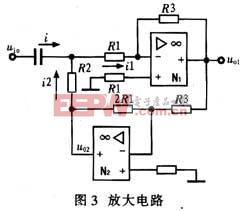
图 3给出放大电路图。它选择一个自举组合电路,该电路通过减小向输入回路索取的电流来提高输入阻抗,其值为Rin=R1R2/(R1-R2),该值可根据前序电路确定R1和R2,使其与前序电路级间匹配。电路中用到的是反相比例放大电路,增益比较稳定,通常K=-R3/R1不会引起自激,可降低干扰对电路的影响。因此,合理地选择R3和R1,可使输出电压达到V级。
本文引用地址:https://www.eepw.com.cn/article/197570.htm
(2)检波精度
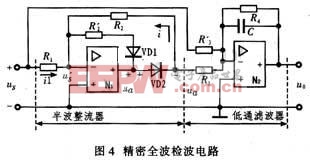
设计中采用了图4所示的全波精密检波电路。为了提高电路的信噪比,衰减掉不需要的频率信号,在输人端加上谐振回路。二极管VD1和VD2选择高频性能比较好的IN60。这种检波方式可以使二极管的死区电压和非线性得到很大的改善。
(3)比较整形电路
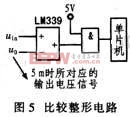
图 5示出比较整形电路。首先在静态下测量距离等于5 m,检波器的输出电压值(该电压同样是经过放大检波电路得到的),并以此电压值作为比较器的参考电压uR。比较器选用LM339,具有失调电压小,电源电压范围宽,其单电源电压为2~36 V,双电源电压为±1~±18 V,而且对比较信号源的内阻限制较宽等优点。对于LM339来说,当两个输入端电压差大于10 mV时,就能确保其输出从一种状态可靠地转换到另一种状态。因此,把LM339用在弱信号检测等场合是比较理想的。一般情况下,比较电路的输出波形的上升沿和下降沿都有延时,可在其后面加一个与门,以改善输出特性。将比较整形电骼的输出送到单片机,对脉冲计数,得到渡越时间。单片机选AT89C52。
3.3温度测量电路
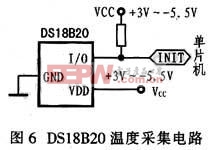
目前,大多数温度测控系统在检测温度时,都采用温度传感器将温度转化为电量,经信号放大电路放大到适当的范围,再由A/D转换器转换成数字量来完成。这种电路结构复杂,调试繁杂,精度易受元器件参数的影响。为此,利用一线性数字温度计即集成温度传感器DS18B20 和单片机,构成一个高精度的数字温度检测系统。DS18B20数字式温度传感器与传统的热敏电阻温度传感器不同,能够直接读出被测温度值,并且可根据实际要求,通过简单的编程,实现9~12位的 A/D转换。因而,使用DS18B20可使系统结构更简单,同时可靠性更高。温度测量范围从-55~+125℃,在-10~+85℃检测误差不超过 0.5℃,而在整个温度测量范围内具有±2℃的测量精度,其电路连接如图6所示。
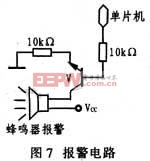
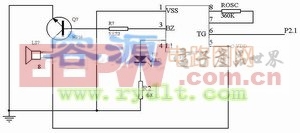
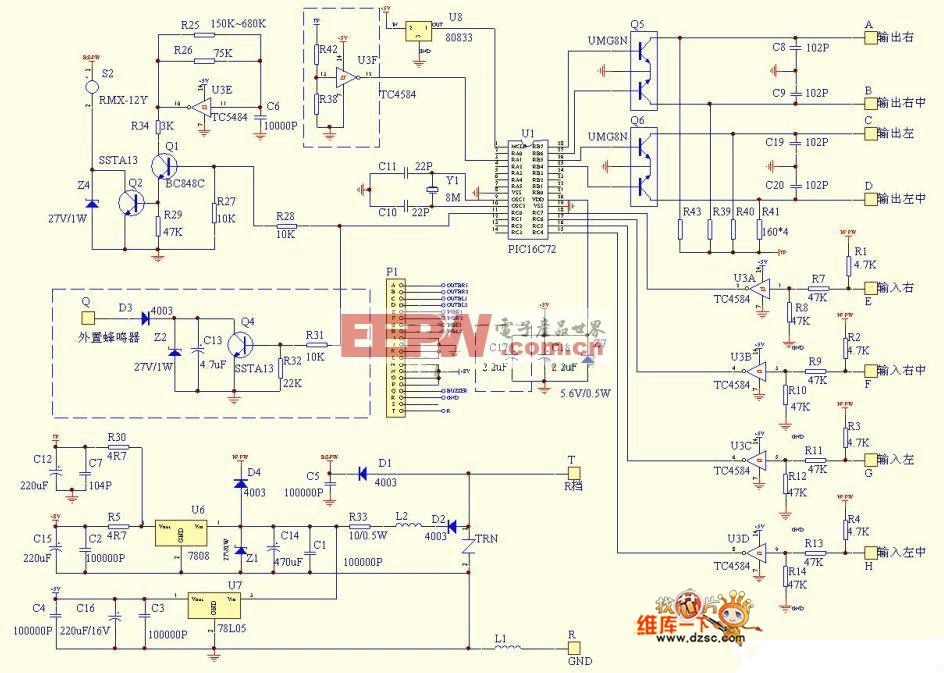
3.4显示及报警电路
显示电路采用4位共阳LED数码管,码段由74LS244驱动电路驱动;驱动电路由PNP晶体管8550驱动。图7给出报警电路。它采用晶体管驱动。
4结语
该倒车雷达系统利用超声波实现了无接触测距;采用高精度温度传感器实现了对超声波测距系统的温度测量和补偿,即根据v=331+0.60T,对声速进行了补偿,提高了测量精度。具有电路设计简单,价格便宜,测量精度比较高的优点,目前已批量生产。






评论