磁浮列车模型定位系统的设计

3 系统的软件设计
在该定位系统中,信号源来自磁控开关组,软件设计的主要任务在信号处理模块中。在数字电路中,时钟脉冲信号是重要的信号之一。从经济和电路体积结构上讲,往往采用一个高频品振产生一种高频率的脉冲,再利用其他的分频方法进行分频,从而产生需要频率的脉冲。本文采用30 MHz的品振经过千分频得到需要的30 kHz。
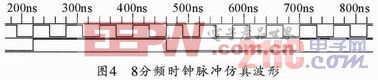
N分频电路的设计思想是对输入脉冲每N/2个周期响应一次,利用简单的边沿触发来控制输出,即对输入脉冲进行计数,每输入N/2个脉冲,输出翻转一次,则输出脉冲频率是输入脉冲频率的1/N倍,从而实现了N分频。文中用上述方法经XilinxISE Simulator仿真得到8分频时钟脉冲仿真波形如图4所示,波形图中可以看出,分频器采用了计数原理,得到了8倍分频仿真效果。为了减少计数器占用的逻辑单元,计数器应使用最少的二进制位数,千分频亦可用同样的方法实现。
基于FPGA的信号处理模块的任务是获得磁浮列车的区间位置量。首先建立区间位置与磁控开关的状态编码成的二进制数字序列之间对应关系列表,依据上述位置总线的状态从18’b110xxxxxxxxxxxxxxx到18’bxxxxxxxxxxxxxxx011。当磁浮列车的位置发生变化时,磁控开关组的状态也发生变化,通过查表的方式得出区间内的位置,并通过数据总线传送。
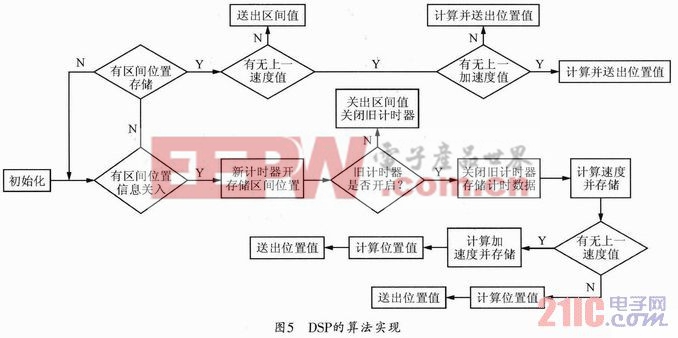
基于DSP的处理单元的任务是如何获得磁浮列车的速度和加速度。当有区间位置信息输入时得到图5,开启计时器,利用存储的区间长度和计时时间可以求出磁浮列车的速度,然后利用前两次存储的速度值可求出列车的加速度,最后利用这些参数求出列车在区间的相对位置和速度,送入CAN总线。





评论