在线式UPS软件锁相

从以上分析可知,可以设计沿不同的曲线进入锁相目标区,而且此曲线与P_D=62的交点P1越靠近P_D轴越好(沿此曲线进入锁相目标区时F_D小,不容易走出锁相目标区),但必须满足:P1>调节步长(本方法中=4),否则被调节点有可能在进入锁相目标区之前进入第2象限,影响调节速度(第2象限调节过程将接着介绍)。
2F_D(F_D+1)=P_D与P_D=62的交点为:由2F_D(F_D+1)=62得F_D≈5,因此满足以上条件并有很好的进入方向。
最大调节时间计算:
最大相差180°时定时器计数值差=12500,沿着F_D=15至P_D=480的时间:
T1=〔(12500-480)/15〕20ms≈16s
P_D=480沿曲线c进入锁相目标区的时间:
T2=(480/5)20ms≈2s;
T=T1+T2≈18s
最大频率调节速度计算:
考虑到最恶劣情况,55Hz时,采用每周期+4的方法增加频率,1s内则T的变化量为:
55×4×0.8μs=176μs
频率增加为:1000/(18.181-0.176)≈55.5Hz
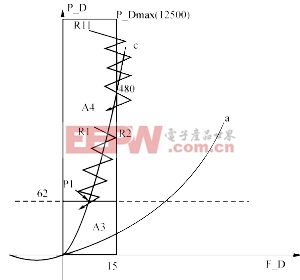
图4调相的目标区域

图5第2象限的状态
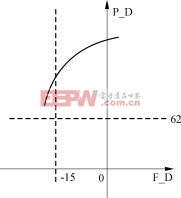
图6先增加频率进入第1象限
最大频率调节速度为55.5-55=0.5Hz/s,符合规格所要求的1Hz/s。
2.3第2象限状况分析
第2象限中状态如图5所示。
此时,不管相差如何,一直采用增加逆变频率F_INV的方式调节,这样,F_D绝对值不断减小,而P_D不断增大,直到进入到第1象限。如图6所示。
2.4其他象限中状况
第3、第4象限分别采用与第1、第2象限类似的方法调节。
3结语
(1)先调频,后调相,当频差绝对值|F_D|>15时,先将频差绝对值调至|F_D|15;
(2)第2、第4象限采用减小频差绝对值的方法将其状态转入第1、第3象限;
(3)第1、第3象限内先沿着|F_D|=15的直线方向减小|P_D|,当|F_D|480时,沿着曲线c,2F_D(F_D+1)=P_D(第1象限)和曲线c的轴对称曲线(第3象限)进入锁相目标区域A3[(0,0),(15,62)];
(4)采用上述方法能满足所有参数要求,且进入锁相目标区域时有很好的进入方向;
(5)设计进入锁相目标区域方向曲线时应考虑到进入速度和进入方向:在进入之前|F_D|尽可能大(速度快),进入时|F_D|尽可能小,但要避免转入其他象限。






评论