功率稳定可调LD驱动电路的设计

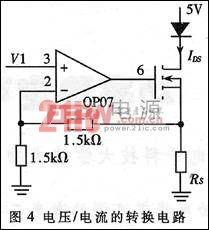
由上述可见,驱动电流由V1及小电阻Rs决定。在实际中取Rs为30Ω的高精度电阻,则由上式可得满量程电流为150mA。由于LD正常工作时,其压降为2V左右,所以这样设计驱动电流最大值不会超过100mA,对LD可以起到保护作用。故驱动电流在0~100mA之间可调。由上式可见,最大驱动电流可以通过调节Rs的大小来得到,设计灵活性较大。
此外 ,电路中单片机与计算机间通过RS232串行口进行通信,采用的RS232收发器为MAX3232。计算机通过串口可对LD的初始驱动电流、参考监测电压进行设置,还可以对PID数字调节器的比例、积分、微分系数进行设定,这样可以方便快捷地整定出调节器的参数。存储器中存放一些设定参数以及暂存PID运算的中间结果。
数字PID调节
PID调节器控制结构简单,参数容易调整,不必求出被控对象的数字模型便可调节。其输入e(t)与输出u(t)间的关系为:

为了实现编程,将上式写成离散化,可写出第k次采样式PID的输出表达为:

式中,E(k)为第k次采样式的偏差值。设监测电压设定值为V0set,差分放大器第k次输出的采样值为Vo(k),则:
E(k)=Voset-Vo(k) (5)
为程序设计方便,将式(4)作进一步改进,设比例输出为:Up(k)=KpE(k),积分项输出为:Ui(k)=K1E(k)+P1(k-1),微分项输出为:UD(k)=Kd[E(k)-E(k-1)],那么式(4)可写成:
U(k)=U p(k)+Ui(k)+UD(k) (6)
式(6)即为离散化的位置型PID编程方式,一般采用浮点运算。当Kp、KI、KD分别给出且存放在指不定期的内部RAM中时,则完成式(6)位置型浮点运算PID运算程序的流程图如图5所示(初始化程序设置初值使E(k-1)=UI(k-1)=0)。

在PID三种作用中,比例作用可对偏差作出及时响应;积分作用主要用来消除静差,改善系统的静态特性;身分作用主要用来减少超调,克服振荡,使系统趋向稳定,加快系统的动作速度,减少超调时间,改善系统的动态特性。若能将三种作用的强度配合适当,可以使控制器快速、平稳、准确,从而获得满意的控制效果。PID调节器的参数整定可以使用扩充临界比例度法。
该设计将经典PID控制理论融入激光二极管功率控制中,采用数字调节方式,初始驱动电流(LD输出功率)可设置,最小电流可调量小,调节精度高,最大驱动电流可变。将该驱动电路与温度控制电路配合使用(LD的阈值电流和输出功率受工作温度的影响较大),可使激光二极管输出功率高度稳定且可调。

电子镇流器相关文章:电子镇流器工作原理




评论