基于光电传感器电路的迷宫机器人设计

3.1 传感器电路
传感器电路是获知迷宫信息的主要途径,其电路设计的好坏直接影响着机器人的工作。一般来说,传感器电路由控制电路、发射管、接收管和信号处理电路构成。阳光谱中含有红外成分,所以在迷宫机器人中要想方设法将红外光谱消除,才能保证迷宫机器人的正常运行。
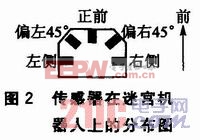
本设计使用了5路传感器,分置于迷宫机器人的正前、偏左45°、左侧、偏右45°、右侧。每一路的打开与关闭由处理器控制,如图2所示。本文引用地址:https://www.eepw.com.cn/article/169059.htm
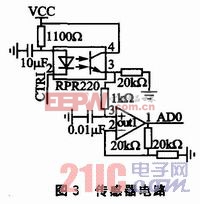
本设计中的传感器电路如图3所示。CTR1为传感器的开关控制口,CTR1置高时,发射管两端没有电压差,所以传感器不会对外发射红外信号;CTR1置低时,发射管和传感器均工作,对外发射红外光谱信号。当发射的红外光谱经迷宫墙壁发射反射回迷宫机器人时,接收管会产生感应电流。此时,RPR220的3号端口的电阻将该端的电动势拉高。如果电流增大,那么3号端口输出的地电动势也会相应增大,从而实现对迷宫环境的信息探测。
3.2 传感器电路的使用
从前面的分析可以知道,传感器采集信号时存在着阳光干扰。在设计期间,我们也进行了相应的干扰实验。结果表明,阳光的干扰十分强烈,完全可以使得红外传感器失去作用。因此,在传感器电路的使用过程中必须考虑阳光对光电传感器的干扰,可从硬件和软件两方面去消除阳光的影响。
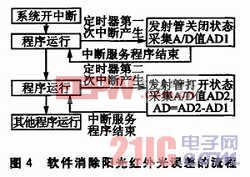
在本设计中,采用了软件消除误差的方法。首先,CTR1置高,也就是传感器发射管处于关闭状态。这时使用处理器的A/D采集模块对接收管的信号进行采集,作为基值AD1。然后,将CTR1置低,将发射管打开,再一次用处理器的A/D采集功能进行信号采集。这时采得的数据为AD2,是反射光谱和阳光红外谱的混合信号,而真正的A/D值应为AD=AD2-AD1。软件消除阳光红外光误差的流程如图4所示。
本设计采用MC9S12DG128处理器的PB0~PB4控制5个传感器的开断。实验表明,软件消除阳光红外光误差的方法效果较好。

DIY机械键盘相关社区:机械键盘DIY










评论