基于台达20PM的点胶机数控系统

首先向D1868中赋值H8003选中运动子程序0X3,然后启动运动子程序。触发条件可以用外部开关信号触发,如图6所示。

图6 运动控制系统启动
4.5 运动子程序编写
编程树形图如下所示:

子程序主要完成G码运动控制。要灵活运用Z0变址寄存器来实现,我们把运动数据放在D2000开始的寄存器里如图7所示。
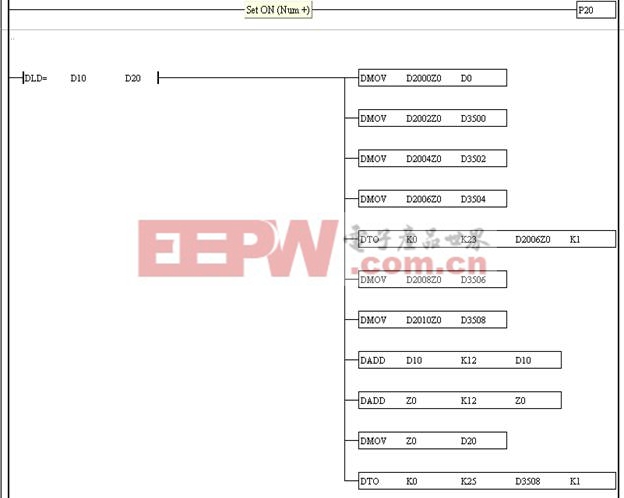
图7 G码运动数据
我们这里用到的G码有G01直线运动、G02顺时针圆弧插补运动控制、G03逆时针圆弧插补运动控制。可以看到我们需要G码选择2个字、X坐标2个字、Y轴坐标2个字、半径2个字、速度2个字,备用2个字。相当于1条运动指令我们需要12个字。所以我们只需要执行一条运动指令后Z0加12,在把新的数据赋值到D3500-D3508里面就可以了。让程序在子程序里循环检测,检测到D2000Z0为1的时候调用G01、为2时调用G02、3时调用G03、4时用FROM/TO指令完成对01PU的运动控制,直到检测到G码D2000Z0为0跳出子程序,如图8所示。



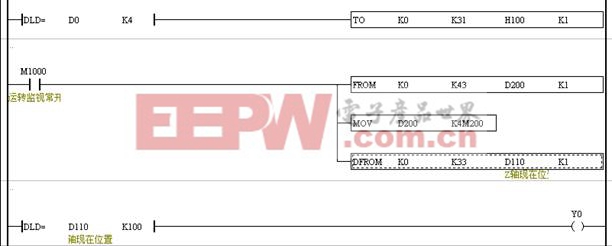
图8码运动控制
4.6 人机界面HMI程序
主要包括对D2000以后的寄存器赋值和显示的功能,这里可以用配方配合。还有在HMI上点动设置好X/Y/Z的坐标下载到D2000以后的寄存器里。可以在根据需要在做个当Z轴到指定坐标后Y0输出,让胶水动作。
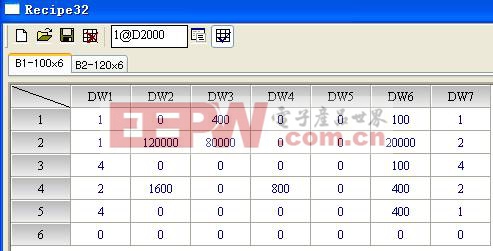
用台达Screen Editor 2.00.05里选择-工具-32配方-新建1个100×6的配方,在上面的地址栏填数据的起始地址1@ D2000,然后里面填好需要的数据。做个新界面做一些数据显示的框地址从RCP0开始对应D2000,用RCPNO和RCPG选择组数和配方数。用控制区第5个字的第2位和第3位控制配方的上传、下载,如图下所示:
5 结束语
使用20PM能很好的实现点胶机的功能。编辑和踩点式录入轨迹参数、速度可以自由设定,界面操作简单方便。经过测试我们画出的圆达到半径1.5毫米不会走形,完全满足用户要求。整个设备的精度还和机械设备有关系,比如:如果用伺服电机代替步进电机、丝杆代替皮带的话,可能在高速点胶过程中精度更稳定。实践证明20PM在运动控制中稳定可靠,本案例可以应用到相关机械设备。

手机电池相关文章:手机电池修复
燃气报警器相关文章:燃气报警器原理





评论