基于CAN总线的联合收割机智能控制系统的设计与实现

2.6.2 谷物湿度传感器
谷物湿度传感器是获取收获时谷物的湿度,以便将所有的产量转换成标准值。在联合收割机上使用的谷物湿度传感器,主要按照极板式电容传感器原理设计。
2.6.3 割台高度传感器
割台高度用来指示当前收割机是处于收割状态还是抬起状态,它的测量可以通过电位器(或接触开关)来实现。
2.6.4 地速的测量
地速可利用传统的雷达法、变速箱轴转速法以及GPS来测量,这些方法都有各自的局限性,将这几种方法互补使用,将是理想的测量方法。
2.6.5 转速的测量
转速有光电脉冲法(包括精密的光电编码器)、霍尔元件法等很多成熟技术可供选用。
2.6.6 割幅宽度的测量
割幅宽度可以使用超声波进行测量。
2.7 系统抗干扰设计
2.7.1 系统硬件抗干扰设计
(1)滤波技术
a.将电源变压器的进线段加入滤波器,以削弱瞬变噪声干扰。
b.在直流电源线和地线之间接滤波电容,以抑制电源噪声。
(2)去耦电路
在印刷电路板的各个集成电路的电源线端与地线端之间配置去耦电容。
(3)屏蔽技术
屏蔽技术主要由电场屏蔽、电磁场屏蔽和磁场屏蔽三类,本系统采用电场和电磁场屏蔽的方法。主要使用低电阻材料作为屏蔽材料,把需要隔离的部分保卫起来。磁场屏蔽则应采用高导磁率的材料。
(4)光电隔离
在I/O通道上采用光电隔离器,将单片机系统与各种传感器、开关从电气上隔离开来,很大一部分干扰可被挡。
2.7.2 系统软件抗干扰设计
对于微机测控系统,仅仅考虑硬件的抗干扰是远远不够的,采取一定的软件抗干扰措施非常必要,它不仅能降低系统的硬件成本,又可以充分发挥软件的优势,使系统具有自我诊断、自我恢复的能力。本系统采用的软件抗干扰措施主要有以下几种:
(1)数字滤波技术,采用数字滤波技术除去输入信号中所掺杂的各种随机干扰。
(2)软件陷阱技术,当系统受到干扰,PC值发生变化,程序“乱飞”等情况,可以用软件陷阱和看门狗将程序拉回到复位状态。具体的讲,可以在RAM中埋一些标志,在每次程序复位时,通过这些标志,可以判断复位原因并根据不同的标志直接跳到相应的程序。这样可以使程序运行有连续性,用户在使用时也不易察觉到程序被重新复位过。本文引用地址:https://www.eepw.com.cn/article/163159.htm
3 软件设计
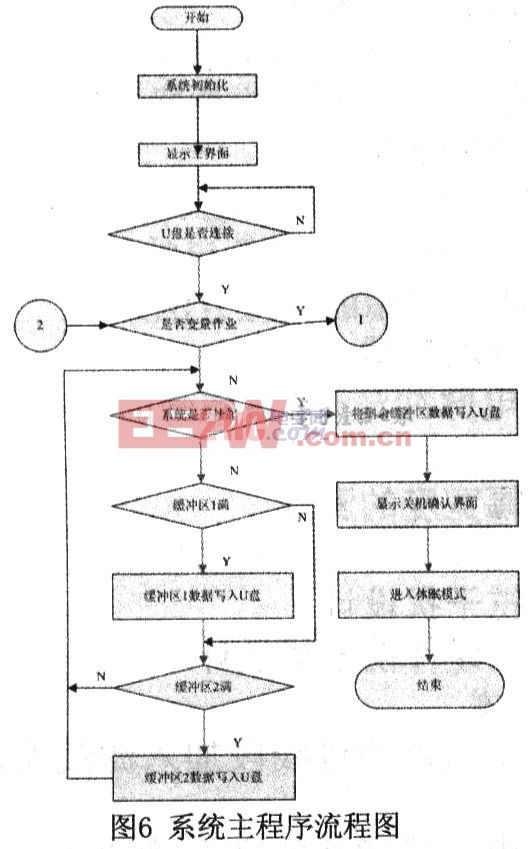
本系统软件主要由CAN总线通信、数据实时处理、LCD显示子程序、触摸屏控制数据存储和变量作业处方图文件读取等六大模块组成,因为C语言编写的软件易于实现模块化,生成的机器代码质量高、可读性强、移植性好,所以本系统的软件采用C语言编写,在WAVE6000编译器环境下编写代码和调试。
主程序主要完成硬件初始化、子程序调用等功能,主程序流程图如图6所示。
4 结束语
随着电子技术的广泛应用,智能温室控制必将成为一种发展趋势,文中提出利用P87C591单片机和新型传感器对联合收割机环境进行测试,目前原型机己取得成功。调试结果表明,本系统可靠性高、使用方便,下一步将在此基础上开发控制系统,给用户提供更大的方便。











评论