无刷直流电机控制器UCC3626的原理及应用


2.2 测速信号
UCC3626的测速信号TACH_OUT来自内部精确的单稳态电路,通常由HALLA、HALLB、HALLC三个霍尔位置信号的上升沿或下降沿触发,其频fT(Hz)和电动机的极对数p、转速n(r/min)成正比例关系:
fT=pn/20
单稳时间tON可由连接到R_TACH和C_TACH脚的电容R和电容C决定:tON=RC
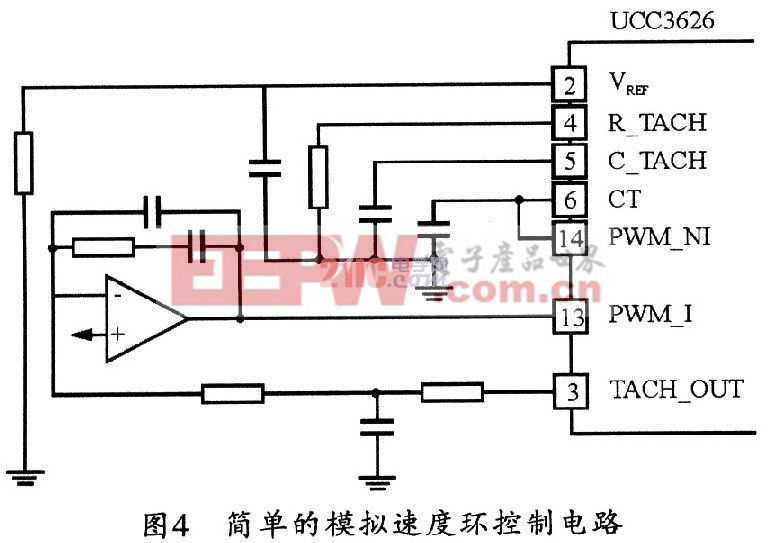
测速信号TACH_OUT可用于微控制器的数字闭环速度控制。测速信号TACH_OUT经过滤波后所得到的速度大小模拟信号,可用于模拟速度控
制,图4所示是一个简单的模拟速度控制电路连接方法,图中的速度指令信号可连接到外面附加的运算放大器上。
2.3 两象限或四象限运行控制
电动机一般有四个可能的工作象限。两象限控制时,电动机一般工作在I和Ⅲ象限(转矩和转速方向相同)。由于两象限工作的无刷直流电
机控制器,除了摩擦力之外,没有使负载减速的能力,因此,这种方式仅限于要求不高的场合;需四象限控制则提供四个象限工作,这时的转矩和转速方向相反,故可提高系统运动的快速性。
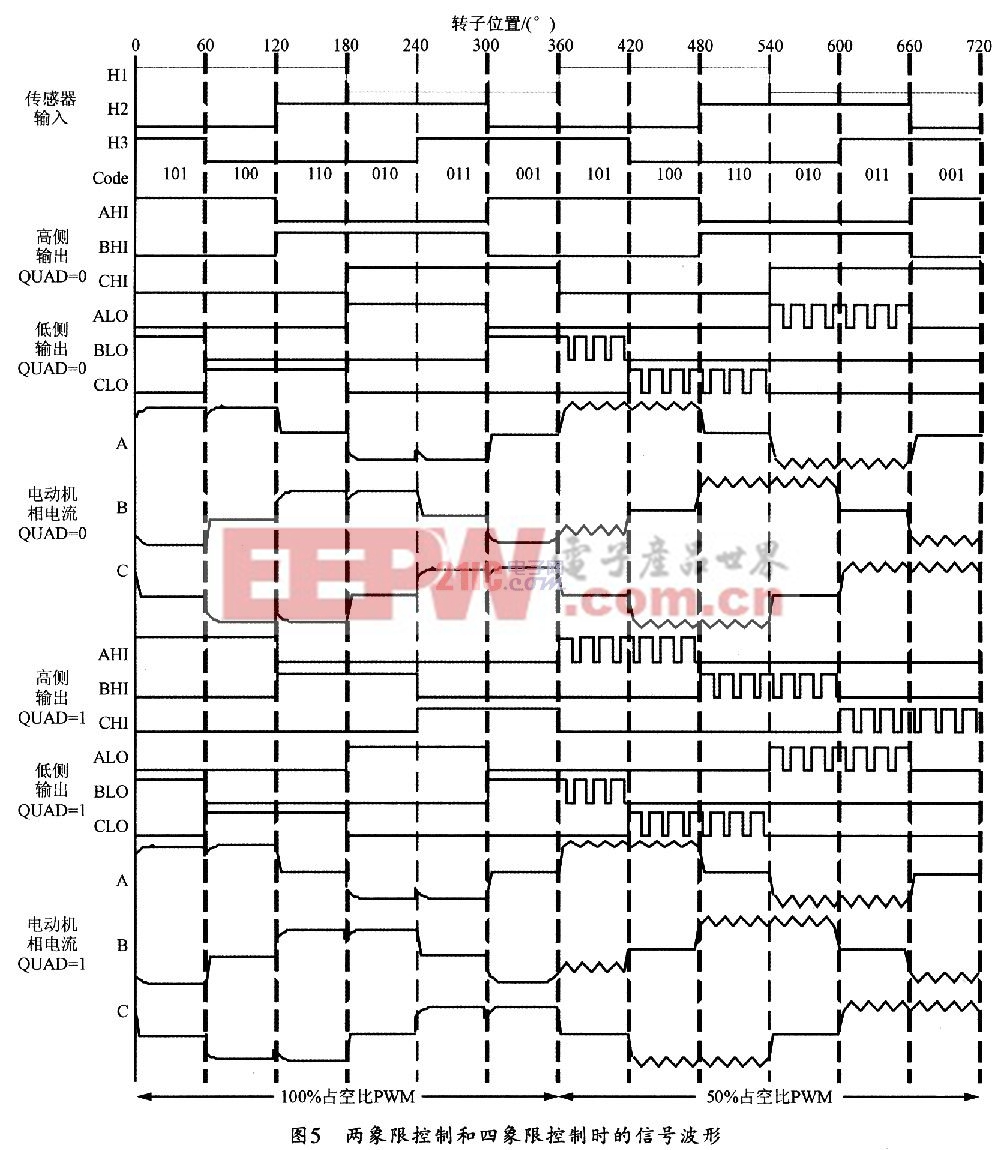
UCC3626可通过QUAD端选择两象限和四象限控制。当QUAD为0时,为两象限控制,此时UCC3626只对功率开关的低侧进行PWM控制;而当QUAD为l时,为四象限控制,此时高侧开关和低侧开关同时进行PWM控制。图5给出了两象限和四象限控制时的主要电流信号波形。











评论