多变量系统辨识及其PID解耦控制的研究

加入解耦控制器后系统转化为

对于式(20)可以利用单变量的控制方法对其进行控制。
4 解耦系统仿真
应用MATLAB软件对解耦控制进行仿真验证。假设传递函数矩阵为
首先采用全极点近似使其转化为线性系统,采用全极点近似后式(21)变为
以式(21)中G11,G22为例进行全极点近似,其仿真结果如图3所示。
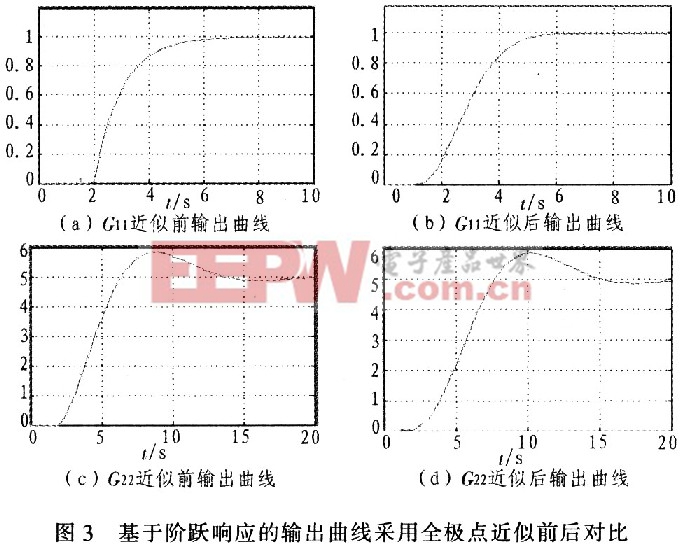
从上面的仿真结果看出近似前后输出曲线基本一致,说明全极点近似方法能够很好体现原系统的性能。
为了求的解耦矩阵,对式(22)取逆并且与![]() 相乘求的D(s)
相乘求的D(s)

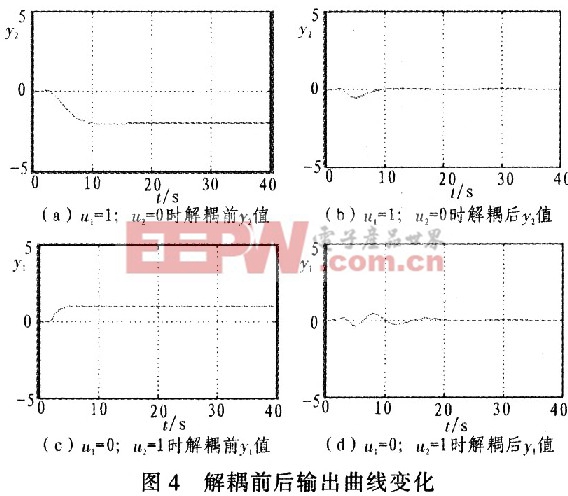
得到解耦矩阵后,通过仿真分析解耦后系统间的耦合程度,从输入端u1、u2分别加入阶跃信号后解耦前后系统输出曲线如图4所示。从图中可以看出,解耦后两个回路之间的耦合程度大大降低,有效减少了回路间的干扰,控制系统的性能得到大大提高。
5 结论
通过理论和仿真实验证明,采用频域辨识和对角矩阵解耦的控制方法取得很好效果,为系统能够长期稳定的运行提供保证。

pid控制器相关文章:pid控制器原理






评论