基于模糊控制的感应电机直接转矩控制系统

2 模糊直接转矩控制系统设计
模糊控制是一种典型的智能控制方法,以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制,其基本思想是把人类专家对特定被控对象或过程的控制策略总结成一系列控制规则,通过模糊推理得到控制作用集,作用于被控对象或过程。与传统的控制方法相比,模糊逻辑控制无需系统的精确数学模型,具有鲁棒性强,控制性能好的优点,更适合对复杂、非线性时变、滞后系统的控制。模糊自适应PI速度调节器由常规PI控制器和模糊控制器两部分组成,其原理如下:模糊控制器选用速度误差e和速度误差变化率ec作为输入变量,利用模糊规则经过模糊推理,输出比例修正系数△KP、积分修正系数△KI,以在线实时调整PI控制器的参数,进而产生给定转矩信号,送入DTC控制系统对感应电机转速进行控制。图2给出了系统的原理图。
2.1 模糊变量
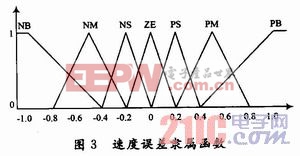
本模糊控制器采用两个输入变量和两个输出控制量。两个模糊输入变量分别为速度误差、速度误差变化率,分别用e和ec表示,输出控制量为比例修正系数和积分修正系数,分别用△KP和△KI表示。e包含7个模糊子集,相应的语言变量为:负大(NB)、负中(NM)、负小(NS)、零(Z)、正小(PS)、正中(PM)和正大(PB),论域为[-1,+1],隶属分布函数如图3所示。
ec包含3个模糊子集,相应的语言变量为:负(N)、零(z)和正(P),论域同样为[-1,+1],隶属函数如图4所示。
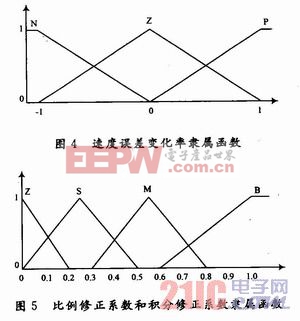
△KP,△KI分别包含4个模糊子集,相应的语言变量为:零(Z)、小(S)、中(M)、大(B),论域为[0,1],隶属函数如图5所示。
2.2 模糊控制规则
模糊PI参数自整定基本原则如下:
(1)当系统偏差(|e|)较大时,为使系统尽快消除偏差,不管ec的符号如何,都应取较大的KP和KI,以达到缩小偏差的目的。
(2)当系统偏差(|e|)是适中时,为防止系统超调过大,应取较小的KP,同时为保证一定的响应速度,KI要选取适中的数值。
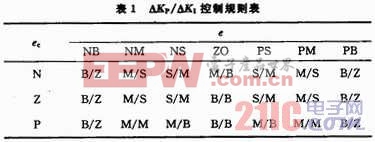
(3)当系统偏差(|e|)较小或为零时,为缩短系统的调节时间,应选取适中的KP和较小KI的数值。根据上述调整规则和多次仿真结果,模糊控制器的控制规则如表1所示。
2.3 模糊推理和模糊决策
模糊推理采用Mamdani推理方法,采用最大隶属度所对应的输出为控制量,得到KP,KI的最终输出值,其控制规则采用“If e=E and ec=Ec then △KP and△KI”的形式。
参照表1可得21条控制规则。
如If e=PB and ec=P then △KP=B and △KI=Z”,输出量为比例修正系数△KP和积分修正系数△KI,在线调节PI参数,达到实时控制的目的。













评论