自平衡人形机器人动作控制器的设计

机器人的动作方式,方向,幅度等全部是由主控制器通过对外部信息的获取而产生的输出,这种输出是基于命令格式的,而机器人最终的一切行为都是一系列舵机的配合运转,从命令到执行,这其中就是动作控制器起到了关键作用。
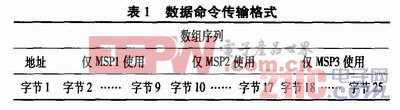
基于上述要求,动作控制器的首要任务就是接收命令。虽然在硬件上采用了多机通信的模式,但并不采用传统的通信协议(每个从机都具有一个独立的地址),而是对动作控制器上的3个MSP430F149定义完全相同的地址,这样就会使其接收到完全相同的命令。这样进行设计,原因在于要保证舵机响应的同时性,即是机器人动作的协调性提出的要求。如表1示例了主控制器与动作控制器的命令传输格式。来自主控制器的命令是一个数组序列,动作控制器上的每个MSP430F149都能完全接收到全部序列,而每个MSP430F149根据预先定义只使用这个序列中特定的子序列,这个子序列就是对应于这个MSP430F149所控制的舵机的命令,这样就可以保证同时性。本文引用地址:https://www.eepw.com.cn/article/162361.htm
动作控制器的最终目的是产生PWM波,而这是通过写MSP430F149片内TA、TB模块的寄存器实现的。在解析函数进行一系列的解析运算后,产生出各舵机所需的PWM波形的脉冲宽度值,将这些值写入到相应的寄存器中,就可以产生需要的PWM波。
2 实验及结论
根据文中提出的动作控制器的设计思想与方法,制作出机器人动作控制器。按照设计的基本思想对动作控制器进行测试,测试中采用一个MSP430F425作为机器人主控制器,下行控制一个十二个关节的简易人形机器人。在MSP430F425中规划好机器人的步态,同时根据规划好的步态参数发送舵机动作命令。
实验中,首先实测舵机的精度,通过向特定定时器通道预装不同值,测量舵机响应角度,并以此数据拟合出舵机响应角度方程。实验中由于采用的MSP430F425资源有限,方程仅进行了线性拟合。
表2为测试机器人上一处关节的舵机测定数据,根据此数据拟合出以下方程:

舵机实际角度α=(X-3 000)/20+75.5运用拟合出的方程进行命令到舵机角度的解析,得到表3所示数据

从表中数据可以看出,在舵机的性能范围内(舵机的精度为0.5°~1°),控制是精确的。
同时,在舵机响应的及时性方面,也得到了保证。从主控制器发送命令到舵机响应开始运动共经历了命令传输、命令解析两大时间段。
命令传输在特定的速率下传输完所有命令数据用时4.5 ms,而命令解析即单片机内程序执行,其用时远小于1 ms。相比较,舵机的机械响应时间在百ms级,因此动作控制器保证了响应的及时性。
实验证明,在设计思想指导下的硬件和软件实现,充分符合既定的目标,体现在机器人的多关节能够协调动作,预先规划的步态能够很好的表现出来。
在机器人的实际控制系统中,动作控制器作为主控制器(ARM 9)的下级从属设备,完成其特定的管理范围内工作。在这种分层控制的体系结构下,自平衡的检测与控制达到了理想的效果。
3 结束语
由于自平衡人形机器人具有内在不稳定性和结构的复杂性,国内外机器人爱好者对其控制策略进行了多方面的探索,但通常都是采用反馈控制环路或者是分层体系结构的方法。采用这些传统的方式大体都是中央处理器(ARM、DSP等)接收收集到的信息,进行处理,再根据获取的信息运用一定的算法控制执行元件(舵机、直流电机等)。这类体系结构一般以惟一的处理器为核心,与外界直接进行信息交换,但其处理器的工作量大,在大量的处理中实时性难以保证。
而本设计对应的双足自平衡人形机器人采用了这两种经典结构的复合,其中执行控制器、主控制器和执行电机之间体现出了明显的层次结构,这种设计减轻了各层次的任务难度,明显提高了设备调试或故障排查效率,充分体现出这种体系结构的优越性。







评论