电力操作电源两种控制方式的比较

RC为滤波电容的串联等效电阻;
R为负载电阻。
由图2可得电压环单环的开环传递函数为:
Tvo1(s)=HFMGV(s)GdV(s)(4)
由图3可得电流环单环的开环传递函数为:
Tio1(s)=KiFMGi(s)Gdi(s)(5)
将如图1所示的实际电路参数代入式(4)和(5),其中Uin=515V,Upp=3.5V,Ki=0.1。做出波特图。图4为电压环开环波特图,其剪切频率为1.5kHz,相位裕量为28°。图5为电流环开环波特图,其剪切频率为10kHz,相位裕量为81°。
2.2串级型双环控制方式
这种控制方式的电路原理图如图6所示,它在结构上将两个单环串联起来,同样也能实现电路恒压和恒流两种工作方式。当D3导通时,电路工作在恒流模式,此时,电压环不起作用,电路相当于单环控制,其电路方框图和传递函数同图1所示电路工作在恒流模式是一样的,不再重复。当D3截止时,电路工作在恒压模式下,电路采用串级双环控制,电流环作为电压环的内环,电压环PI调节器的输出UV2作为电流环PI调节器的给定。其电路方框图如图7所示,在设计参数时,先设计电流环的调节器,获得稳定的内环,然后得到电流环的闭环传递函数Tic(s),并将其作为电压环的一个环节,如图8所示,然后设计电压环的调节器。这种控制方式的最大的优点是很好地解决了电路的限流问题,使电路具有最快的限流响应速度。但是这种控制方式的实际限流给定是限流值Uiref加上D3的管压降,因为D3的管压降与通过它的电流有关,所以这种控制方式的稳流精度不如前面那种控制方式,但可以通过调节电阻R3,减小D3管压降的变化量,以提高这种控制方式的稳流精度。
图8电压环双环控制方式下的等效电路方框图
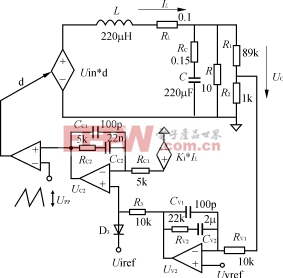
图6串级型双环控制方式的电路原理图
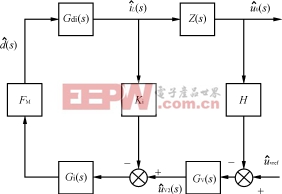
图7电压环双环控制模式下的电路方框图
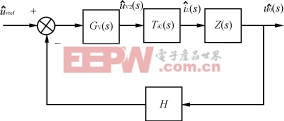
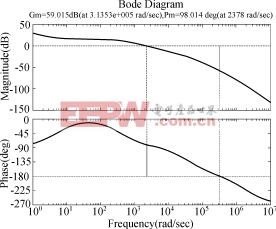
图9双环控制方式下电压环的开环波特图
图7和图8中,Z(s)为负载和输出电容支路的并联阻抗:![]() Z(s)=(6)
Z(s)=(6)
其它函数在上面已经定义,就不再复述。
根据图7,得到电流环(内环)的闭环传递函数为:![]() Tic(s)=(7)
Tic(s)=(7)
然后由等效方框图图8可得,电压环的开环传递函数为:
Tvo1(s)=HGV(s)Tic(s)Z(s)(8)
为了便于比较两种控制系统特性,串级型双环控制方式下的控制参数与并联型双环控制方式下的控制参数一致。将如图6所示的实际电路参数代入式(8),其中Uin=515V,Upp=3.5V,Ki=0.1。得到串级型双环控制方式下电压环的开环波特图,如图9所示。其剪切频率为378Hz,相位裕量为98°,稳定裕量为59dB。
3两种控制方法的比较
31串级型双环控制方式具有更快的限流响应速度
在并联型双环控制方式下,当系统的工作状态由恒压模式切换到恒流(限流)模式时,由于存在一个切换的过渡过程,往往会导致限流速度太慢,甚至发生两个环交互作用,互相干扰而导致系统的不稳定。因为当电路工作在恒压模式时,此时的输出电感电流平均值比限流设定值低,所以电流环PI调节器正向饱和输出UC1,这时负载突然增大,并且电感电流平均值大于限流值,但电路并不是立即进入限流状态,而是要等到UC1的输出从正向饱和状态退出并且降到比电压环PI调节器输出UV1低时,此时DC1才导通,限流环才开始起作用。这样就会有可能带来两个问题:一是如果这段时间太长,系统有可能因为不能及时限流而导致过流保护;二是如果电流环和电压环的响应速度比较接近时,则在这个过渡过程中有可能两个环交错作用,互相干扰,导致系统的不稳定。图10所示波形是当两台模块并联运行时,关掉一台模块,另一台模块过流保护时输出滤波电感电流的波形,其波形是采用霍尔传感器得到的,检测系数为20:1,通道1为模块1输出滤波电感电流波形,通道2为模块2输出滤波电感电流波形,实验条件为:两台并联工作输出42A,模块的限流值为25A。此时关掉模块1,对于模块2相当于突然增加一倍负载,由图中可见,由于模块2的限流环不能及时作用,导致其过流保护。
图11显示了通道1为电压环PI调节器输出UV1,通道2为电流环PI调节器输出UC1。负载没有突变时,系统工作在电压环单环控制模式,此时UV1决定电路的占空比;UC1饱和输出,(在实验电路中为了加快其响应速度,将它限幅在6V)电流环不工作。当负载突增,输出电压下降,因此UV1上升,当电感电流平均值超过限流值时,UC1下降,但在电路中由于电压环和电流环的速度接近,使它们在过渡过程中交错作用,导致系统的不稳定。
而系统采用串级型双环控制方式时则不会有此类问题,因为在这种情况下,电路工作在恒压模式时,说明电压环PI调节器的输出小于限流环设定,D3截止,但电流环作为内环仍然在工作着。同样如果此时负载突然增加,则由于输出电压降低,所以电压环的PI调节器输出增加,当UV2大于限流值时,D3导通,系统则工作在恒流模式。从电路结构中看,这种控制方式是对电压环PI调节器的输出进行限幅,限幅值就是电流环的限流值Uiref,这样一旦电压环PI调节器的输出大于限流值Uiref,系统就立即进入限流状态,从而使系统具有最快的限流响应速度。图12是当两台模块并联运行时,关掉一台模块,另一台模块快速限流时的输出滤波电感电流波形。通道1、通道2分别为模块1、模块2的输出滤波电感电流,电流检测系数为20:1。此时模块的限流值和保护值不变。同样两台模块也是并联工作,输出42A。然后关掉模块1,由图12可见,采用串级型双环控制后,模块2快速限流,并且无超调。
32串级型双环控制方式具有更好的系统稳定性能
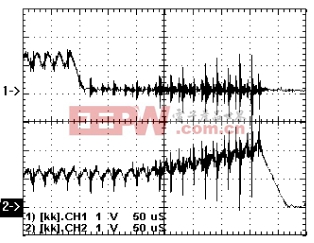
图10并联型双环控制方式下突变负载引起过流保护
脉宽调制相关文章:脉宽调制原理






评论