基于双模糊控制的温度控制系统研究

2.3.2 模糊规则设计
双模糊控制中的模糊控制器根据误差和误差变化率的不同状态,工程设计人员的技术知识和实际操作经验,建立合适的模糊规则表,得到模糊控制规则如表1所示。本文引用地址:https://www.eepw.com.cn/article/161835.htm

3 基于Matlab/simulink的双模糊控制系统仿真
3.1 建立模糊推理系统结构
在Matlab命令窗口键入fuzzy命令进入模糊逻辑工具箱,在FIS Editor窗口的Edit菜单下确定输入、输出变量的论域范围和各个语言变量的隶属函数曲线等参数,双击每个图标就可以进行编辑,得到模糊控制器的文件。
3.2 建立模糊控制规则
用Edit菜单下的rules打开模糊规则编辑器确定“IF…THEN”形式的模糊控制规则。u共有控制规则56条,每条规则的加权值都缺省为1,推理算法为max-min合成法,解模糊方法采用取重心法。将设计好的模糊控制器保存在一个用户自己定义的文件,后缀为fis。
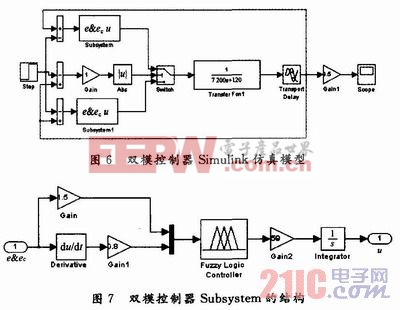
3.3 创建仿真框图
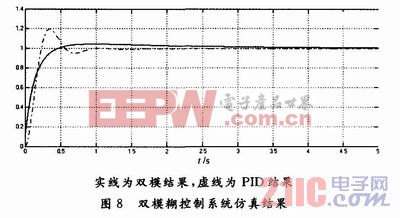
在Simulink环境下,建立模糊-PI双模控制器仿真系统结构见图6,图7,仿真结果如图8所示。双模系统稳定且消差的关键在各个参数的选择上,从仿真结果可以看出,双模糊控制系统的上升时间和最大超调量都有所减少,系统性能更好,使得控制器的性能得到较大的改善。
4 结论
本文提出的双模糊控制器当系统误差较大时,采用模糊控制器FC1进行控制,以达到快速响应,消除误差的目的,以获得良好的动态性能;当系统误差较小,采用模糊控制器FC2进行控制,从而达到极大地消除静态误差的目的,以获得较好的稳态性能。通过在Matlab/ Simu-link环境下的仿真研究可以看出,与传统的PID控制器和常规的模糊控制器相比,双模糊控制器能很好地解决前者上升时间长,超调量大的缺点,且在快速性、稳定性及准确性方面都有较大的改善。















评论