基于双模糊控制的温度控制系统研究

2.3 模糊控制器设计
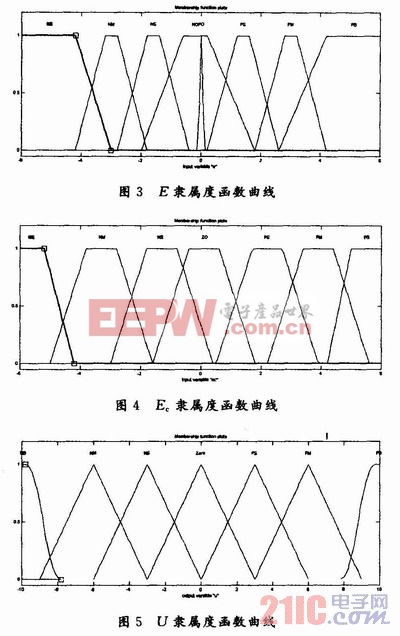
2.3.1 确定输入、输出隶数度函数
模糊控制器采用二维结构,以误差e和误差变化率ec作为模糊控制器的输入信号,将模糊控制器进行模糊化、模糊逻辑推理、解模糊化等一系列操作,最后得到模糊控制器输出控制信号量u。根据双模糊控制器的原理,令其输入为E和Ec,输出为U,并确定输入输出的隶属度函数。取E,Ec,U的模糊论域为[-6,6]。实际误差e的变化范围是[-0.5,0.5],实际误差变化率ec的变化范围是[-1,1],实际输出控制量u的变化范围是[0,10]。因此可确定偏差e的量化因子Ke=15,偏差变化率ec的量化因子Ke=6,控制量u的量化因子Ku=1。变量E的语言值设定为8个,即{负大(NB)、负中(NM)、负小(NS)、负零(NO)、正零(PO)、正小(PS)、正中(PM)、正大(PB)};将变量Ec的语言值设定为7个,即{负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)};输出变量U的语言值也设定为7个,即{负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)},E,Ec,U的隶属度函数选为梯形,如图3~图5所示。本文引用地址:https://www.eepw.com.cn/article/161835.htm















评论