一种异步FIFO的设计方法

3 保守的满空判断本文引用地址:https://www.eepw.com.cn/article/161677.htm
对于异步FIFO设计,无论是采用握手还是直接同步的方法来获取对方时钟域的指针,对满空信号的判断总是“保守”的。
(1)满空信号的复位(满信号复位表示FIFO非满,空信号复位表示FIFO非空)和实际FIFO的情况相比有一定的延迟。例如,空信号是由读者用读指针与同步或握手后得到的写指针进行比较产生的。由于同步或握手需要一定的时间,在这段时间,写者可能向FIFO写入新的数据,写指针发生了变化,此时FIFO已经非空,但此刻空信号仍然没有复位。对于写者而言,满信号的复位也会遇到相同的问题。不过,在通常情况下,FIFO只要确保不会向下溢出或向上溢出,复位的延迟就不会导致向下溢出或向上溢出,是可以接受的。
(2)满空信号的置位(满信号置位表示FIFO满,空信号置位表示FIFO空)和FIFO的实际情况相比没有延迟。例如,同样考虑FIFO为空的情况,读者使用读指针和同步或握手后的写指针进行比较,由于FIFO为空,写动作不会发生,相应的写指针也保持不变,因此读者获得的就是当时的写指针值。这样就能马上对空信号置位。同样地,在FIFO满的情况下,由于读指针不发生变化,写者得到的是当前的读指针值,能够马上判断FIFO为满。
从以上两点的讨论可以得出结论,FIFO满空判断是保守的,写者可能在FIFO还有一定空间时停止写数据,但不会在FIFO已经满了的情况下继续写数据;读者可能在FIFO还有一些有效的数据时停止读数据,但是不会在FIFO已经空的情况下继续读数据。保守的满空判断能够满足FIFO的功能要求。
4 二进制指针和格雷码指针的比较
二进制指针和格雷码指针两者各有优缺点:
(1)由于通过握手同步,指针可以有多位同时变化,二进制指针每次移动可以跳跃过任意的长度,这样给FIFO的某些功能的实现带来了方便(例如,硬件直接控制FIFO从缓存的数据流中丢弃一个出错的包);而格雷码指针一般只能做递增或递减的移动。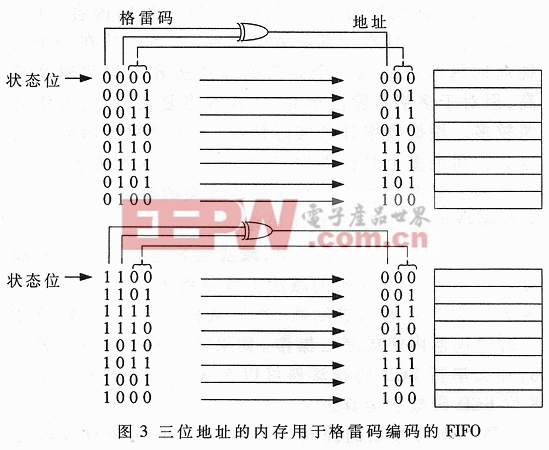
(3) 与直接同步相比,通过握手同步需要多时钟周期,因此二进制指针的满空判断比格雷码指针的满空判断更“保守”;对于设计一个容量很大且由内存构成的FIFO来说,由于保守判断而损失的空间可以忽略;但对于一个容量较小的FIFO而言,这种“保守”可能是无法接受的。例如,一个由8个寄存器组成的FIFO,对于格雷码编码的指针,最坏情况下,FIFO被写者判断为满时,里面实际只存有五个数据(使用两级同步器,可能需要三个周期同步,而在这三个周期内都有读动作发生);而对与二进制编码的指针,FIFO被判为满时,FIFO里可能只有三个数据或更少(使用两级同步器,最好的情况下,需要五个周期握手,而在这五个周期里都有读动作发生)。
本文介绍的异步FIFO的设计方法的两种不同尽路都能够实现功能正确的异步FIFO。对这两种方法设计的FIFO的优缺点所做的简要分析,对FIFO的设计具有指导意义。













评论