惯性传感器促进移动机器人自主工作

正向控制
机器人本体命令,即主要误差信号,代表轨迹规划器提供的行程计划与反馈检测系统提供的行程进度更新信息之间的差异。这些信号被馈入逆向运动学 系统,后者将机器人本体命令转换成每个车轮的转向和速度配置文件。这些配置文件使用阿克曼转向关系*进行计算,整合了轮胎直径、表面接触面积、间距和其他重要几何特性。利用阿克曼转向原理和关系,上述机器人平台可创建以电子方式链接的转向角度配置文件,类似于许多汽车转向系统中使用的机械齿轮-齿条系统。由于这些关系是以远程方式整合在一起的,不需要以机械方式链接车轴,因而有助于最大程度减小磨擦和轮胎滑移,减少轮胎磨损和能量损耗,实现简单的机械链接无法完成的运动。
车轮驱动和转向系统
每个车轮均有一个驱动轴,通过变速箱以机械方式连接至驱动马达,同时通过另一个变速箱耦合至光学编码器,即测程反馈系统的输入端。转向轴将车轴耦合至另一伺服马达,该马达负责确立车轮的转向角度。转向轴还将通过变速箱耦合至第二个光学编码器,也即测程反馈系统的另一个输入端。
反馈检测和控制
导航系统使用一个增强的卡尔曼滤波器,通过结合多个传感器的数据来估算行程图上机器人的姿态。Seekur 上的测程数据从车轮牵引和转向编码器(提供转换)和MEMS陀螺仪(提供旋转)获得。
测程
测程反馈系统利用光学编码器对驱动和转向轴旋转的测量结果来估算机器人的位置、驶向和速度。在光学编码器中,用一个碟片阻挡内部光源,或者通过数千个微小窗口让光源照射在光传感器上。碟片旋转时,便会产生一系列电脉冲,这些脉冲通常被馈入计数器电路。每旋转一圈的计数次数等于碟片内的槽孔数目,因此可从编码器电路的脉冲计数计算旋转数(包括小数)。图4提供了将驱动轴旋转计数转换成线性位移(位置)变化的图形参考和关系。
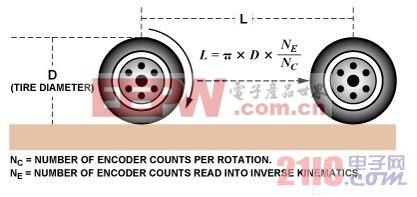
图 4. 测程线性位移关系。
每个车轮的驱动轴和转向轴编码器测量结果在正向运动学 处理器中用阿克曼转向公式进行组合,从而产生驶向、偏转速率、位置和线速度等测量数据。
该测量系统的优点在于其检测功能直接与驱动和转向控制系统相结合,因此可精确得知驱动和转向控制系统的状态。不过,除非可参考一组实际坐标,否则该测量系统在车辆实际速度和方向方面的精度有限。主要限制(或误差源)在于轮胎几何形状一致性(图 4 中 D 的精度和波动),以及轮胎与地面之间的接触中断。轮胎几何形状取决于胎冠一致性、胎压、温度、重量及在正常机器人使用过程中可能发生变化的所有条件。轮胎滑移则取决于偏转半径、速度和表面一致性。
位置检测
Seekur系统使用多种距离传感器。对于室内应用,该系统采用270°激光扫描器为其环境构建映射图。激光系统通过能量返回模式和信号返回时间测量物体形状、尺寸及与激光源的距离。在映射模式中,激光系统通过将工作区内多个不同位置的扫描结果组合,描述工作区特性(图 5)。这样便产生了物体位置、尺寸和形状的映射图,作为运行时扫描的参考。激光扫描器功能结合映射信息使用时,可提供精确的位置信息。该功能如果单独使用,会存在一定限制,包括扫描时需要停机以及无法处理环境变化等等。在仓库环境中,人员、叉车、托盘搬运车及许多其他物体常常会改变位置,这可能影响到达目的地的速度,以及到达正确目的地的精度。









评论