惯性传感器促进移动机器人自主工作

Allan 方差 关系式还有助于深入了解最佳积分时间(τ = t2 – t1)。该曲线上的最低点通常被确定为运行中偏置稳定度。通过设置积分时间 ,使其等于与所用陀螺仪的Allan方差曲线上最低点相关的积分时间,可优化驶向估算结果。
包括偏置温度系数在内的条件相关误差会影响性能,因此它们可决定需要每隔多久停止一次机器人的运行,以更新其偏置校正。使用预校准的传感器有助于解决最常见的误差源,例如温度和电源变化。例如,将ADIS16060改为预校准的ADIS16265可能会增加尺寸、价格和功率,但可以将相对于温度的稳定性提高18倍。对于2°C温度变化,ADIS16060的最大偏置为0.22°/秒,而ADIS16265只有0.012°/秒。
如以下关系式所示,灵敏度误差源与实际驶向变化成正比:
商用MEMS传感器的额定灵敏度误差通常在±5%至±20%以上,因此需要进行校准以减小这些误差。例如ADIS16265和 ADIS16135等预校准MEMS5陀螺仪的额定误差小于±1%,在受控环境中甚至可以达到更高性能。
应用范例:
仓库库存交货
仓库自动化系统目前使用叉车和传送带系统移动材料,以管理库存并满足需求。叉车需要直接人为控制,而传送带系统则需要定期维护。为了最大化仓库价值,许多仓库正在进行重新配置,从而为自主机器人平台的应用敞开了大门。一组机器人仅需要更改软件、对机器人导航系统进行再培训就能适应新任务,完全不需要实施大量工程作业来改造叉车和传送带系统。仓库交货系统中的关键性能要求是机器人必须能够保持行程模式的一致性,可在有障碍物移动的动态环境下安全执行机动动作,并且保证人员安全。为了说明在此类应用中MEMS陀螺仪反馈对Seekur的价值,Adept MobileRobots用实验方式分别展示了在不使用(图 8)和使用(图 9)MEMS陀螺仪反馈的情况下,Seekur保持重复路径的能力。应注意,为了研究MEMS陀螺仪反馈的影响,该实验未采用GPS或激光扫描校正。
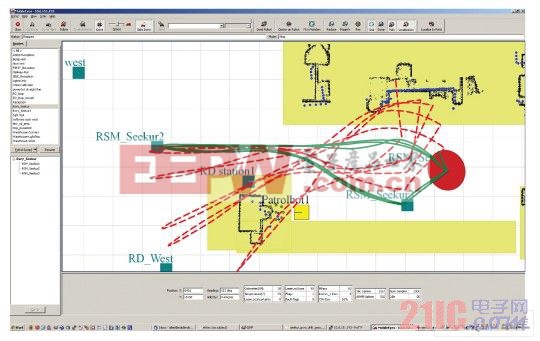
图 8. 未使用MEMS陀螺仪反馈时的Seekur路径精度。
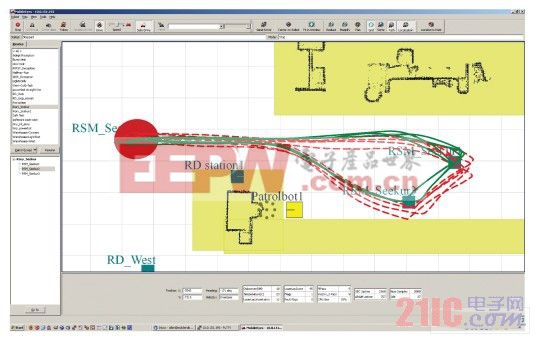
图 9. 使用MEMS陀螺仪反馈时的Seekur路径精度。









评论