基于双环控制和重复控制的逆变器控制方案研究

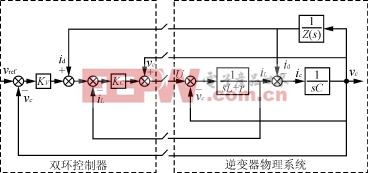
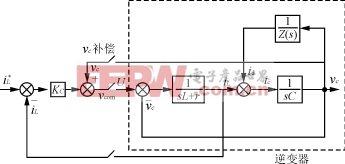
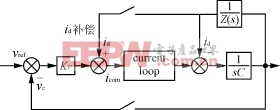
摘要:研究了一种基于双环控制和重复控制的逆变器控制技术,该方案在电流环和瞬时电压环之外附加了一个重复控制环。在实现输出电压解耦和扰动电流补偿后,根据无差拍原理设计的双环控制器使逆变器达到了很快的动态响应速度;位于外层的重复控制器则提高了稳态精度。该方案在一台基于DSPTMS320F240控制系统的PWM逆变器上得到验证。 关键词:逆变器;双环;无差拍;重复控制 0 引言 随着闭环调节PWM逆变器在中小功率场合中的大量使用,对其输出电压波形的要求也越来越高。高质量的输出波形不仅要求稳态精度高而且要求动态响应快。 传统的单闭环系统无法充分利用系统的状态信息,因此,将输出反馈改为状态反馈,在状态空间上通过合理选择反馈增益矩阵来改变逆变器一对太接近s域虚轴的极点,增加其阻尼,能达到较好的动态效果。单闭环在抵抗负载扰动方面与直流电机类似,只有当负载扰动的影响最终在输出端表现出来以后,才能出现相应的误差信号激励调节器,增设一个电流环限制启动电流和构成电流随动系统也可以大大加快抵御扰动的动态过程。瞬时值反馈采取提高系统动态响应的方法消除跟踪误差,但静态特性不佳,而基于周期的控制是通过对误差的周期性补偿,实现稳态无静差的效果,它主要分为重复控制和谐波反馈控制。 本文提出了一种基于双环控制和重复控制的逆变器控制方案,兼顾逆变器动静态效应,另外使用状态观测器提高数字控制系统性能。 1 逆变器数学模型 单相半桥逆变器如图1所示,L是输出滤波电感,C是输出滤波电容,负载任意,r是输出电感等效电阻和死区等各种阻尼因素的综和。U是逆变桥输出的PWM电压。 图1 单相半桥逆变器 选择电感电流iL和电容电压vc作为状态变量,id看作扰动输入,得到半桥逆变器的连续状态平均空间模型为 式中:x= A= 根据式(1),很容易得到逆变器在频域下的方框图,如图2所示。PWM逆变器的动态模型和直流电机相似,转速伺服系统的设计方法在这里也适用。本文借鉴直流电机双环控制技术,并改造成为多环控制系统,在逆变器波形控制上取得了很好的效果。 图2 逆变器框图 2 控制方案分析 本控制方案包括双环控制系统和位居外层的重复控制系统。在瞬时波形控制场合,控制算法的执行时间和A/D转换延时相对于采样周期通常不可忽略,有必要采用状态观测器,利用其预测功能将控制算法提前一拍进行。本方案采用无差拍观测器对输出电压和电感电流进行预测。 2.1 双环控制 双环控制系统框图如图3所示,Z(s)是未知的负载。需要检测和反馈的信号有三个,即电感电流iL,输出电压vc,负载电流id。电感电流检测为电流环而设。与直流电机相似,检测输出电压不仅用于电压瞬时波形控制而且实现输出电压解耦,消除输出电压对电流环的扰动,减轻电流环控制器的负担。同样,负载电流对瞬时电压环来说也是一个外部扰动,补偿负载电流能有效抑制其对输出波形的影响,提高稳态精度。正是由于对负载电流进行了补偿,电流环无须对负载电流的扰动进行抑制,所以,本方案没有反馈电容电流,而将扰动包含在反馈环路的前向通道内。若采用电容电流反馈,要得到良好的扰动抑制效果,必将导致电流环的增益过大。这不仅对稳定性不利,而且造成超调增大,电流跟踪的快速性受影响。 图3 双环系统控制框图 模拟控制系统的闭环极点离虚轴越远则动态响应越快,但无法将其配置到s平面的负无穷处,而s平面的负无穷被映射到z平面原点,若将数字控制系统的闭环极点全部配置到平面原点,则可以达到极快的动态响应速度,这就是所谓的无差拍技术。 由于本方案实现了输出电压解耦和负载电流补偿,电流环和电压环的结构大大简化,控制器的设计可以简单到仅仅采用P环节。这里采用无差拍原理确定电流环控制器KC和瞬时电压环控制器KV。 2.1.1 电流环设计 图4(a)所示为电流环框图,为了实现输出电压交叉反馈解耦,控制算法由式(2)给出。 vcom(k)=KC〔iL*(k)-iL(k)〕+vc(k)(2) 式中:iL*是电感电流指令; vcom是电流环计算出的控制量。 图4(b)是解耦后简化的电流环框图,ZOH是零阶保持器。采用零阶保持器法将控制对象离散化。 Gc(z)=Z 式中:T是采样周期; a=r/L。 (a)电流环框图 (b)解耦后简化的电流环 图4电流环设计 闭环系统的特征方程是 Z- 根据无差拍原理,将其特征根全部配置在原点,于是有 2.1.2 瞬时电压环设计 由于电流环的截止频率高于瞬时电压环,对电流指令的跟踪速度要远快于瞬时电压环对波形的跟踪,在设计瞬时电压环时可认为内环是一个常数增益环节。图5(a)是瞬时电压环框图。对负载电流进行补偿后,相应的控制算法由式(6)给出。 (a)瞬时电压环框图 (b)补偿后简化的电压环 图5 电压环设计 
![]() (1)
(1)![]() ;u=
;u=![]() ;y=
;y=![]() ;
; ;B=
;B= ;C=[0 1]。
;C=[0 1]。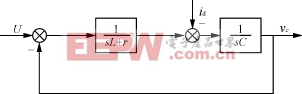
![]() =
=![]() (3)
(3)

![]() =0(4)
=0(4)![]() (5)
(5)








评论