基于MEMS 和MR 传感器的嵌入式系统姿态测量

3. 姿态参数的获得
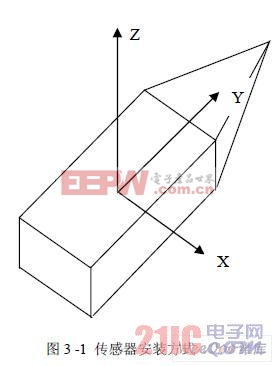
在本系统中,三轴加速度计和三轴 MR 传感器都以以下的方式安装于电路板上:它们 的X 轴平行于系统的横轴指向右,Y 轴平行于系统的纵轴指向前,X、Y、Z 轴定义为右手 坐标系统,如图3 -1 所示。
3.1 俯仰角与横滚角的获得:
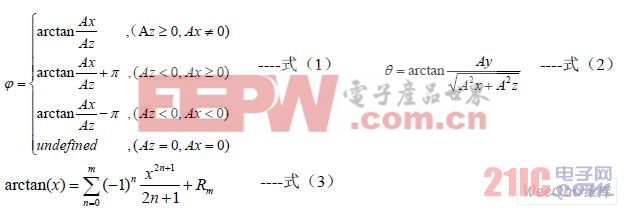
为了获得系统基于重力向量的俯仰角θ 和横滚角φ,需要使用加速度计的三个输出:Ax, Ay, Az 。俯仰角和横滚角可以通过以下公式(1)和公式(2)计算得到。对于微控制器,函数 中的arctan(x) 需要通过以下公式(3)的泰勒展开后才能计算得到。
3.2 方位角的获得:
为了获得系统相对于当地地磁向量的方位角,需要使用MR 传感器的三个输出Mx, My, Mz 。当系统置于水平状态时(俯仰角和横滚角都为0)时,方位角ψ 可以由公式(4)直 接给出,但是在大多数情况下,系统并不是工作在水平状态,此时地磁场的竖直分量将会影 响Mx 和My 的值,因此不能直接由公式(4)获得相对于地磁向量的方位角。为了在所有 情况下都能获得正确的方位角,必须将俯仰角和横滚角考虑在内,即必须通过以俯仰角和横 滚角为参数的坐标变换,将测得的(Mx, My, Mz)向量变换为与载体坐标系有相同方位角的 水平坐标系下的向量(M’x , M’y, M’z),其变换矩阵如公式(5)。

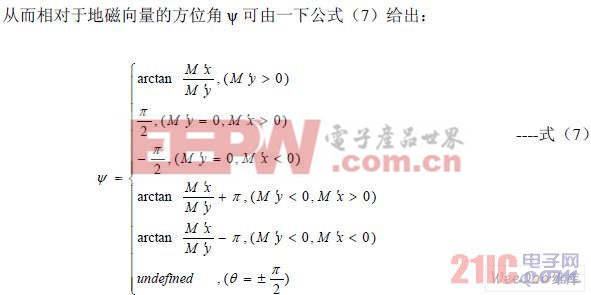
至此,系统的3 个姿态参数全部由公式(1)(2)(7)给出。
4. 误差分析:
本文论述的姿态测量系统主要由 MEMS 加速度计和MR 传感器组成。由于现有MRMS 技术的限制,其精度和传统的加速度计还有一定的差距,这将给所得到的俯仰角和横滚角带 来更大的误差。MR 传感器是对磁场敏感的器件,当其被放置在铁磁环境中的时候,地球的 磁场将受到附近铁磁环境的扭曲,这将导致方位角的误差。然而这种由于附近铁磁物质的影 响而引入的误差是可以补偿的。
5. 结论:
使用MEMS加速度计和MR传感器构成的姿态测量系统有效的降低了整个系统的体积、 成本以及功耗,使得嵌入式系统也可以引入姿态测量的功能。本文论述的姿态测量系统非常 适用于汽车导航,机器人姿态测量等领域。本文的创新点在于使用MEMS 和MR 元件构造 了应用于嵌入式系统中的姿态测量系统,并详细给出了各姿态参数的计算方法。
linux操作系统文章专题:linux操作系统详解(linux不再难懂)
接地电阻相关文章:接地电阻测试方法








评论