主动式太阳能追日系统设计

1.3 太阳位置的确定
因为在天球上的所有圆圈中,地平是在自然界中唯一能看到的在天空中被勾画出的圆,同时,铅垂线所具体代表的垂线,以及由水准仪所定出的水平线是在几何坐标系中惟一能容易直接观测的参考方向。所以,地平参考系一直是实用中必不可少的参考系统。在实际观测中,最重要的几何坐标系就是以地方天文地平作为基本参考圈的地平坐标系。把直接观测的天空形象用严格的几何方式系统表示时,它也是实际中唯一可用的坐标系。因此,太阳跟踪器采用地平坐标系直观方便,操作性强,但是,也存在轨迹坐标计算没有具体公式可用的问题。而在赤道坐标却严格已知,同时,赤道坐标系和地平坐标系都与地球运动密切相关,因此,通过天文三角形之间的关系式可以得到太阳和观测者位置之间的关系。综合分析,在进行太阳跟踪观测时,两维程控太阳跟踪器的运动数学模型采用地平坐标系作为基准坐标系,并借助赤道坐标系来进行空间坐标转换以获得即时的太阳高度角和方位角。
虽然太阳在天球上的位置每日、每时都有变化,但是其运行具有严格的规律性。根据其相互运动规律,可以通过天文公式计算出太阳在赤道坐标系中的太阳赤纬角和太阳时角。在实际使用中,由于太阳赤纬角和太阳时角是建立在赤道坐标系中,不便于直接应用,因此一般将其转换到人们所熟悉的地平坐标系中,即由太阳赤纬角和时角计算出太阳高度角和太阳方位角。当太阳高度角和方位角确定后,太阳的位置也就唯一确定了。
根据天体几何学中太阳运行轨迹算法公式,太阳的位置通过下列球面三角公式精确求出:
sinH=sinδ·sinφ+cosδ·cosφ·cosω (1)
sinA=cosδ·sinτ/cosH (2)
其中,太阳高度角为H,太阳方位角为A,涉及3个天文地理坐标:δ为太阳赤纬角,φ为观测点的地理纬度,ω为观测时的太阳时角。这3个天文地理坐标可以通过以下方式获得:
①观测地点的地理纬度通过GPS等精密导航仪器可以方便获得。
②赤纬角和时角的计算需要通过时间确定。由于太阳在一年中的时角运动很复杂,日常生活中的钟表时间采用平太阳时,即太阳沿着周年运动的平均速率,在工程计算中,就会存在时差问题(真太阳时与平太阳时之差),因此必须采用真太阳时,否则在实际观测中无法达到精度要求。为了得到准确的真太阳时,可以根据定时标准来校准时差值,真太阳时计算公式如下:
真太阳时(视时)=时差+平太阳时(平时) (3)
其中:时差可以根据地球绕太阳公转的规律由天体力学算出,在每年的天文年历中可以查到。
2 系统总体方案
系统能根据装置所在地点的地理参数自动计算太阳的高度角和方位角,并结合系统对天气的检测结果,驱动电机完成追日。
(1)太阳能收集装置安装位置及工作时间的获取
借助GPS等设备通过终端输入模块为系统设定当前所在地区的经纬度、时间等参数,这是实时计算太阳高度角及方位角的基础,若系统所处地理位置发生较大变化,则需要重新输入地理位置坐标及当前时间。
(2)太阳高度角及方位角的计算
根据太阳能收集装置安装位置及工作时间实时计算太阳高度角及方位角是本设计方案的重点与难点之一,需进一步深入研究其算法实现,这是能否实现精确追日的关键。
(3)步进电机对太阳能收集装置的角度驱动
经ATmega32单片机实时计算产生相应脉冲来驱动步进电机,通过传动机构对太阳能收集装置进行角度驱动而完成偏摆,进而实现太阳能收集装置随太阳位置变化的实时旋转。
(4)工作状态下天气情况的检测
若为阴雨天气,则停止对太阳能追日装置的角度校正。
3 系统硬件设计
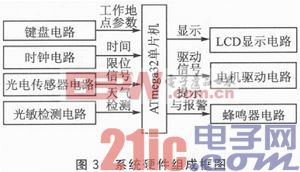
3.1 硬件组成框图
系统硬件除通用电路(电源电路、JTAG电路、RS232串口通信电路)外主要分为8个部分,具体为ATmega32单片机、电机驱动电路、键盘电路、LCD显示电路、时钟电路、光电传感器电路、光敏检测以及蜂鸣器电路。组成框图如图3所示。本文引用地址:https://www.eepw.com.cn/article/159420.htm
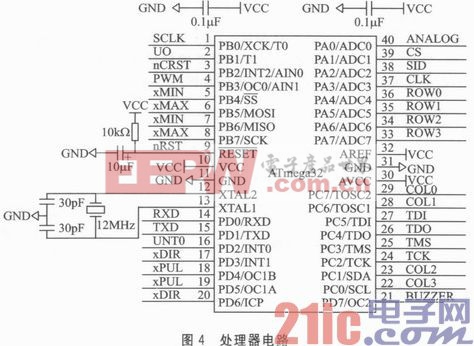
3.2 处理器电路
选择ATmega32单片机作为主控芯片。处理器采用了较为简单的阻容复位电路,该电路使单片机在上电时可靠复位。选用12 MHz晶体振荡器,单片机在该时钟驱动下,每秒可以执行12M条单周期指令。处理器电路如图4所示。






评论