基于的毫米波天线自动对准平台系统设计

2.2 系统硬件结构设计
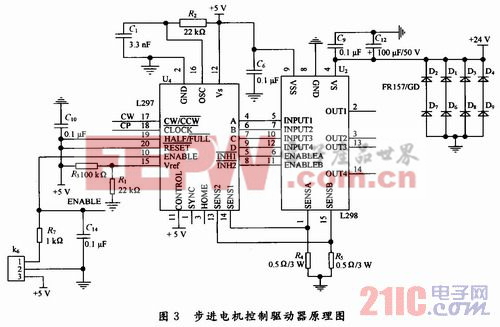
平台控制板的ARM处理器采用LPC2294,其驱动电路由SGS公司推出的L297和L298集成芯片组合而成,驱动电路原理图如图3所示。平台控制板还通过串口与磁罗盘和GPS相连,用于采集所需的数据信息。
显示控制单元仍然采用ARM芯片LPC2294,它同时与键盘和液晶显示器相连,见图2。键盘用来输入己方和对方的坐标以及对平台系统控制命令的输入,液晶显示屏可显示站点坐标、电平信号强度和平台工作状态等,从而构造一个友好的人机交互界面。显示控制单元通过50 m的电缆与平台系统相连,通过CAN接口与平台控制板通信,当用户完成设置时通过CAN接口将设置信息发送到平台控制器,同时显示控制单元还作为整套毫米波设备的基带控制单元的处理中心。
3 软件设计
由于系统功能复杂,为了增加程序功能,减少死机或者程序跑飞等情况,故考虑将μC/OS-Ⅱ嵌入式实时多任务操作系统作为应用软件平台,把各个系统功能划分为不同的任务。由操作系统来完成任务的调度以及任务之间的同步和通信,用中断来处理实时性要求强的异步事件。
3.1 μC/OS-Ⅱ的移植
μC/OS-是一种可移植、可固化、可裁剪及可剥夺的实时多任务内核(RTOS),其绝大部分源码是用ANSI的C语言编写,可以方便地移植并支持多种类型的处理器。μC/OS-Ⅱ的硬实时性以及低成本、易控制、小规模、高性能的特性,使其能满足工业中小型控制对可靠性、实时性以及多任务处理的要求。
编写应用软件首先要移植μC/OS-Ⅱ,移植对处理器有一定的要求。本设计采用的LPC2294处理器以及开发工具ADS 1.2完全满足移植要求,可以进行移植。关于μC/OS-Ⅱ移植的参考资料比较多,本文不再做详细讨论。
3.2 任务的划分与优先级的确定
μC/OS-Ⅱ属于抢占式实时操作系统,总是会使处于就绪状态中优先级最高的任务运行。它不支持时间片轮转调度,所以必须将系统功能合理分解为不同优先级的任务。任务的优先级由任务的重要性和实时性要求程度决定。划分系统任务的时候,还要考虑到低优先级的任务能有机会得到运行,否则系统将难以正常工作。因此建立六个任务进行调度,任务之间的通信方式及流程如图4所示,分别如下:
TaskMotorCtl:任务0,作为程序的主任务,实现初始化和电机控制功能;
TaskCal:任务1,在电机转动过程中实时计算转动角度等相关参数;
TaskPortScan:任务2,端口扫描任务,实现限位开关端口电平的监控功能;
TaskUARTORecv:任务3,串口0磁罗盘数据的接收处理任务;
TaskUART1Recv:任务4,串口1GPS数据的接收处理任务;
TaskCAN:任务5,CAN接口数据收发处理。

运行时有两种状态:
(1)静止状态
首先系统启动之后,进行初始化,然后等待磁罗盘接收信号有效,否则不能进入电机控制任务。在自动运行状态,此时平台处于静止状态,程序对接收到的串口数据进行计算处理后实时更新,并不停地向显示控制单元汇报天线与目标指向的夹角大小。
(2)运动状态
当有按键按下,显示控制单元通过中断的方式对其进行处理,然后通过CAN总线向平台控制板发送控制命令。平台控制板根据控制命令确定转动方向并在转动过程中实时监测是否碰到限位开关。
优先级的划分如下:TaskPortScan优先级最高,因为平台的对准可能会顺时针或者逆时针连续转动,而限位开关能够使平台往某个方向的转动累计不超过一圈,以免引起平台内线的缠绕甚至扯断。因此当平台转动碰到限位开关时,优先级最高,以实时响应断电,并使平台反转,这里通过查询方式来检测是否碰到限位开关。然后就是任务TaskUART0Recv,在转动过程中都需要实时用到航向和俯仰等角度信息,因此实时准确地接收到此类信息显得非常重要。因为TaskCAN用于接收显示控制单元的控制命令,排在任务TaskUART0Recv后面。角度计算任务的优先级排在任务TaskCAN的后面,根据任务TaskUART0Recv传下来的角度原始数据以及其他相关信息,实时计算角度值,以确定平台转动的目标位置。虽然TaskMotorCtl步进电机的控制任务重要,但是几乎全天候运行,如果优先级较高,会占用很多资源,导致其他任务无法进行,所以将其优先级排在靠后。最后是TaskUART1Recv任务,因为一般本方位置在实际对准中不会变化,所以其经纬度数据只需接收一次,其优先级排在最后。












评论