基于DSP和增量式PI电压环控制的逆变器研究

PI环节的传递函数为式(9),其对应的时域方程式为
y(t)=kp![]() (13)
(13)
式中:y(t)为PI输出;
e(t)为PI差动输入;
Ti为积分时间常数;
kp为比例系数。
对式(13)离散化得
yk=kp![]() (14)
(14)
式中:Ts为采样时间。
这即是位置式PI控制,而若采用增量式PI控制,可避免误动作,同时运算不需要累加,对数字控制尤其方便。由式(14)可得
yk-1=kp![]() (15)
(15)
由式(14)与(15)可得
yk=yk-1+kp![]() ek-kp·ek-1(16)
ek-kp·ek-1(16)
式(16)为一般的增量式PI算法,但实际控制中,很多不稳定因素易造成增量较大,甚至比输出还大,进而造成输出波形不稳定,因此,必须对增量式PI算法进行优化。本方案采用饱和区判断法则,即对增量
Δyk=kp![]() ek-kp·ek-1(17)
ek-kp·ek-1(17)
进行判断,当其绝对值越过某一上限ΔYlim,即进入饱和区时,将ΔYlim赋予绝对值。但是,即使对增量进行饱和区判断后,其输出由于累加的结果,也可能很大,甚至超过载波幅值。因此,也必须对PI输出进行限幅处理,此时,可以以调制波幅值作为限幅值,也可简单地以载波幅值作为限幅值,等稳定后这个幅值将不会超过调制波幅值。
2.3 DSP控制算法的实现
TI公司的TMS320LF2407A的最高工作频率可达40MHz,存储结构为哈佛结构,数据、程序和I/O空间的寻址区域均可高达64k,且相互独立,片内则有32k的flash空间。同时片上具有A/D模块,其分辨率为10位,片上还具有PWM输出口,能实现同相、反相输出,还能添加死区控制,能较好地完成电压环控制算法的实现[4]。
程序中采用最高工作频率40MHz,开关频率为20kHz,运用定时器的周期中断,使用连续增或者减模式,产生对称的三角载波。设置比较输出使能,利用比较寄存器CMPR1和CMPR2的值控制PWM1~PWM4的输出,产生两路同相和反相的PWM信号,控制开关管的开通和关断。同时为避免上下桥臂同时导通,程序中加入0.5μs的死区控制。而CMPR1与CMPR2的计算,则由每一个周期中断给出。周期中断时,通过采样电压反馈值,经过优化的PI增量式控制后,产生占空比D,由D与定时期周期即可得CMPR1和CMPR2的值。图7为周期中断的程序流程图。
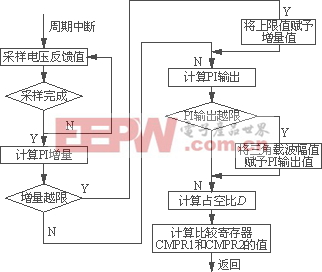
图7 周期中断流程图
3 实验结果
实验主电路为单相全桥电路,如图1所示,其中开关管采用20N60S的MOS管,滤波电感取1mH,滤波电容取10μF,负载R取40Ω,输入直流电压为250V,开关频率取20kHz。PI算法中比例系数取39,积分时间常数取(1/3140)s。
图8为输出电压波形,从图8中可以看出,输出电压峰值为200V,频率为50Hz,且THD很小,输出波形稳定。
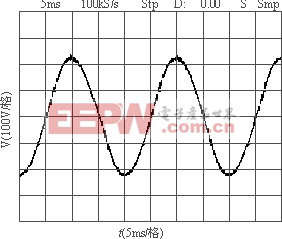
图8 逆变器输出波形
图9为满载切向半载时输出波形的变化,从图9中可以看出,输出经过轻微扰动后,马上恢复稳定,可见动态性能比较好。
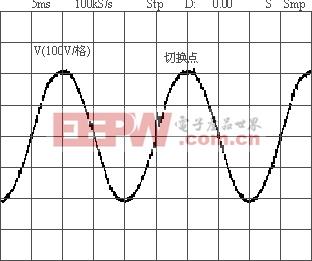
图9 满载切半载时输出电压波形
4 结语
本文提出的逆变器方案,采用电压瞬时值控制,反馈环采用增量式PI控制,并对PI增量和PI输出进行限幅控制,确保了输出的稳定性和精度,同时避免误扰动,有较好的动态性能。控制器采用TI公司的TMS320LF2407A来实现,较好地完成了控制算法。










评论