国产化卫星/MEMS组合导航模块的设计实现

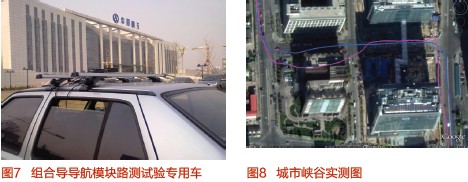
跑车实验:沿着一小区跑车,该小区有高楼,有树荫,其具体的姿态角如下图所示。
本文引用地址:https://www.eepw.com.cn/article/134653.htm
卫星/MEMS组合滤波
导航解算
由于MEMS陀螺不同于传统高精度陀螺,其不能感测地球相对于惯性空间的旋转速率,因而无法使用传统的导航解算公式去实时推算速度和位置。如图4所示,为捷联解算算法流程。
组合滤波算法
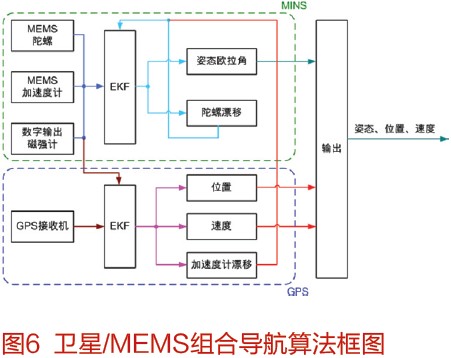
卫星/MEMS组合导航模块实现方案如图5所示,MEMS-SINS模块与卫星导航模块是彼此独立的两个部分,此框图显示了以MEMS-SINS和卫星导航接收机的速度/位置信息做差作为量测量。松耦合组合导航通常有两种形式:开环与闭环,如图5所示,该技术方案采用闭环形式,将卡尔曼滤波估计出的各种误差反馈至MEMS-SINS模块,改善系统性能[5]。
组合导航路测试验
与传统高精度捷联惯性导航系统不同的是,MEMS-SINS模块无法感测地球自转角速率,地球的自转角速率完全淹没在MEMS陀螺的噪声之中,当载体处于静止状态时,认为陀螺输出角速率为0。MEMS-SINS误差方程修正如下所示:









评论