用LabVIEW和CompactRIO开发腿轮移动机器人
作者:Chun Lin,Chiang Chen,Ke Jung Huang,Yu Shen,Hsin Li
时间:2012-01-06
来源:电子产品世界
收藏
 加入技术交流群
加入技术交流群

扫码加入
和技术大咖面对面交流
海量资料库查询
在一般情况下,机器人属于高自由度的复杂系统。机器人的成功发展需要花费时间和精力来妥善整合各种机械、电气和计算机系统。来自国立台湾大学BioRoLa团队,主要由拥有机械工程背景的学生组成,他们需要一个可靠、模块化、易于使用及良好集成的平台。
本文引用地址:https://www.eepw.com.cn/article/127827.htm经过广泛的研究,我们发现NI产品能为我们的应用程序提供最佳解决方案,原因如下:LabVIEW为非编程背景的学生提供了直观的图形化流程图表示方法,可以让他们轻松建立过程图并作为解决方案,然后再将过程图转化为软件。能在Windows,RTOS和基于FPGA的目标上使用相同的图形化开发环境也极其有帮助。由于开发控制器软件时我们不必花时间学习底层的编程语法,因而能够花更多的时间专注于我们设计的机械部分。
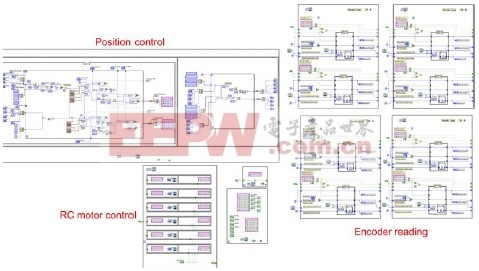
图3. Quattroped 控制FPGA程序框图
“对于移动机器人的开发来说,其大小,重量及性能都非常重要,因此坚固的模块化CompactRIO 系统非常适合用于开发。LabVIEW和NI硬件之间定义良好的兼容性显著地减少了开发者执行系统集成的时间和精力。”
未来计划
凭借NI LabVIEW图形化系统设计和NI CompactRIO,一支机械工程学生团队设计出了一个拥有优雅软件构造的复杂机电一体化系统,对于今后的进一步开发扩展也很方便。在硬件方面,我们正在将各种传感器融合到当前的机电化系统中,以提高机器人的感应能力。在动作方面,我们正在完善和开发具有闭环控制功能的腿部行为,以提高机器人在各种具有挑战性的地形上的移动能力,并开发其腿部动态步态。











评论