什么是3D结构光相机

结构光3D相机,一般指采用多幅条纹光栅(如图),即先通过光栅投射模组按照时间序列依次投射在被测物体表面,再通过双目对物体表面的光栅进行拍照,基于事先编码规则进行解码和双目视差匹配,从而获得高精度的3D点云。由于结构光3D相机采用了多幅光栅进行编码,原理上编码精度可精细到1个像素甚至亚像素,相比其它原理的点云质量和精度会更好一些,已逐渐成为业内主流。
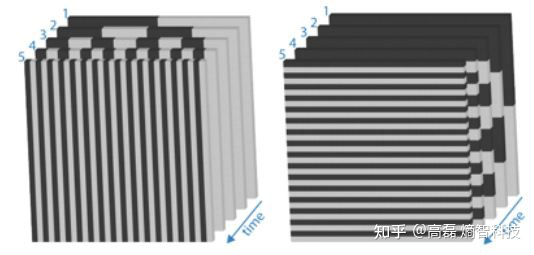
基于时间序列编码的结构光光栅示意图
时间编码结构光系统在设计上类似于常规结构光系统,具有与场景成一定角度的高强度投影仪, 并且相机正对场景。它们利用空间域和时域技术来提供非常详细的点云,还可以提供 RGB 颜 色信息。 Zivid 3D 相机使用的就是时间编码结构光技术。
与其他技术相比,该技术的精确度和准确度最高可提高 100 倍。正是由于这个原因,许多人 认为时间编码结构光是 3D 机器视觉最有吸引力的方法和未来。
简单的结构光方法将单一图案投射到物体上。时间编码结构光将一系列独特的图案投射到物体 上,相机为整个编码系列拍摄多张图像。在不同时间观察每个像素的强度,并用于建立相机和 投影仪中各个像素之间的对应关系。由于使用了时间信息,因此所有计算都在像素级别执行, 避免了对空间邻域的分析。这消除了任何块噪声或空间分辨率的损失。

使用 3D 时间编码结构光视觉的机器人的示意图
*博客内容为网友个人发布,仅代表博主个人观点,如有侵权请联系工作人员删除。