运动控制模块在直流无刷电机伺服系统中的应用(05-100)
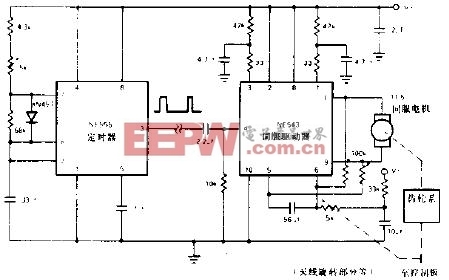
图3是一个典型的运动控制模块的编码信号输入接收器电路(即运动控制模块与正交编码器输出之间的接口电路)。
本文引用地址:http://www.eepw.com.cn/article/91532.htm从正交编码器发出的信号通过双绞线传送到接收电路,每对互补信号线A、 或B、 之间跨与接一个150Ω电阻提供适当的端接。当发生电缆断裂或脱离等开路故障时,要使运动控制模块采取适当的动作,首先必须检测到这些故障。作为一种失效保护措施,当输入信号线开路时,MAX3095接收器会输出逻辑高。1kΩ偏置电阻使输入端“A”的电压至少比输入端“B”高200mV。当有输入端接电阻时,它们仍需保持失效保护输出。这个电路具有ESD防护、开路检测和输出短路保护,但不能检测输人短路。
另一种改进的电路(图4)包含了2片MAX3098,每片都包含三路RS—422/RS-485接收器。

图4 图3的改造电路
各接收器均具有内置的故障检测、±15kV ESD(静电释放)保护和32Mbps的数据速率。而MAX3098E能检测接收器输入开路和短路故障,也能检测低电压差分信号和共模范围超限等其它故障。它的逻辑电平输出能够指示哪一路接收器输入发生了故障。这种直接的故障报告降低了软件开销,并将外部逻辑元件减到最少。
任何一路正交编码器输出即控制模块的编码输入发生故障都会立即在相应输出发出逻辑高信号:ALARM A、ALARM B和ALARM Z。伺服系统移动缓慢时,会在正交编码器信号的过零区域产生瞬时故障,触发“假故障”。通过选择电容C-延迟的值,可将ALARM D输出(ALARM A、ALARM B和ALARM Z的逻辑或)延迟适当的时间。120Ω电阻为RS422电缆提供适当的端接。
关于反馈编码器
由于为实现精确定位,伺服系统必须有一个反馈信号使反馈形成闭环。而能提供这种反馈信号的装置包括光电编码器、旋转变压器和正交磁致伸缩线性位移传感器。
光电编码器输出一个数字方波信号,包括正交(增量)型、绝对值型和伪随机型。一个典型的光电编码器包括光发射器、光接收器、输出原始模拟信号的编码轮。模拟信号被送至编码器的处理电路,转换为数字信号输出。信号输出方式有集电极开路输出和单端输出,逻辑电平为5V至24V。为了降低噪声干扰,最可靠的输出是互补、差分的RS-422。正交光电编码器输出的反馈信号有A、B、Z三种形式的脉冲。信号A和B来自编码器码轮并具有90º的相差。当A超前于B时,表明编码器是顺时针旋转的,反之,编码器为逆时针旋转。因而由这两个信号就可得到位置、方向和速度数据。信号Z表示电机转子的位置和编码器的轴是否转过360º。它还能校验信号A和B的误算。采用 RS-422接口时, 编码器提供互补的A、B和Z输出。

伺服电机相关文章:伺服电机工作原理





评论