直流调速系统的SIMULINK仿真

简介
本文引用地址:https://www.eepw.com.cn/article/86638.htm汽车设计从过去单纯的机械式系统,到如今常常包含多达100个微处理器的现代汽车,已经走过了很长的历程。传统汽车上用到电子器件的部分仅仅是那些娱乐设施,最常见的是汽车收音机。直到有关诸如废气排放量和节油性等汽车各方面性能的政府规定出台以后,对汽车功能的电子控制才开始变得越来越普遍。最初,某些功能是依靠分立式硬件元件或数字逻辑执行的。随着单片机(MCU)等嵌入式处理器解决方案的出现,使用MCU来代替固定硬件的好处正逐步显现,这是因为设计者可以对MCU进行编程以执行模块所要求的特定任务。汽车设计中大量采用了各种MCU,从用在转动挡风玻璃雨刮器和开门等功能的最简单的8位MCU到控制引擎的复杂32位MCU。这个范围的中间是大量的16位MCU,它们本身在计算能力、存储容量、功耗和外设特性方面也呈现出相当大的多样性。为每个独立的汽车子系统选择合适的处理器,并在不同的子系统间合理地分配处理能力,对汽车产品的性能、可靠性和增强功能起着至关重要的作用。
数字信号控制器:单片机和数字信号处理器领域的佼佼者
大多数汽车控制和监视操作都需要大量的数学运算。例如,在引擎预热阶段,空气流量(MAF)传感器和引擎转速计(以每分钟转数(RPM)表示)的输出数据会被MCU采样,然后需要根据测得的数值,计算出要求喷射到每个汽缸的燃油量,公式如下:
F=MAF/(K*N*RPM/120)
其中,K是给定润滑剂温度下的理想(常数)空气-燃油比,N是汽缸的数量。
上面的计算不仅涉及精确的乘法和除法,还必须对要射入的燃油量进行重复计算以适应快速变化的引擎工作条件。因此,当废气含氧量(EGO)传感器已预热充分,能够测量废气的质量时,必须持续监视EGO传感器的输出数据,以调节燃油喷射速率,从而获得最佳的引擎性能并减少废气的排放量。
计算密集型操作的其他实例还有:
a)对来自各种传感器的数据进行有限冲激响应(FIR)或无限冲激响应(IIR)滤波,以消除噪声。应用实例:引擎爆震检测、熄火检测或在持续监视燃油液位时消除油料晃动的影响。
b)进行快速傅立叶变换(FFT)对数据进行分析,以在后续的处理阶段使用频谱。应用实例:主动振动控制或排气噪声消除。
c)根据传感器输入数据的数量级,对其进行定标,以及归一化和线性化处理。
d)比例-积分(PI)或比例-积分-微分(PID)控制算法。应用实例:导航控制。
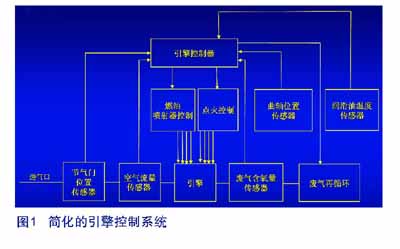
图1描绘了一个简化的引擎控制系统,它本身就是汽车中各种处理器所执行任务的一部分。
车厢噪声消除、引擎爆震检测及防翻滚和稳定性控制等舒适、诊断和安全功能都需要更强的信号处理能力,这就要求使用自适应滤波等数学密集型算法。
进行这样的计算要求所使用的处理器具有非常高速的数学运算功能。8位的MCU或一般的16位MCU架构完全不具备这样的功能,而对成本的考虑又常常会使昂贵的32位MCU无法在这样的场合得到使用。一个专门针对重复性数学处理进行优化的特殊处理器架构——16位数字信号处理器(DSP)可用来执行这样的密集型任务。
但就DSP本身(没有处理控制任务的相关MCU)来说,它并不是非常适合在汽车系统等动态环境中使用。主要有以下几个原因:
a)DSP不具有灵活的中断结构。
b)DSP无法对位(如各个I/O引脚的状态)进行十分高效的操作。
c)DSP在很大程度上需要依赖片外存储器和外设。
d)很少有低引脚数的DSP器件,因而不适合在空间受限的模块中使用。
因此,可执行大量汽车功能的理想单芯片架构平台将是16位数字信号控制器(DSC),比如Microchip的dsPIC30F系列器件。DSC是一款创新的混合型“片上系统”(SoC)架构,它无缝地组合了16位MCU的控制特性和大量的DSP功能。
一方面,DSC架构尤其适合类似于下述的典型控制操作:
a)定期提供中断服务,例如,获取对汽车速度和转向角度的定期采样以计算防抱死制动系统(ABS)所需的制动压力。
b)从多个传感器和控制输入捕捉数据,例如,同时测量汽车速度、加速度、车身和车轮的相对运动,以及转向角度,从而确定主动悬架控制系统的制动水平。
c)向执行机构发送数据和控制脉冲,例如,发送占空比可变的PWM信号以合适的周期开关燃油喷射器或点火电路。
d)与分布式系统中的其他控制器模块共享数据,例如,各种子系统周期性地发送状态数据到诊断模块或用户显示面板。
另一方面,DSC的CPU支持功能强大的一套DSP指令和灵活的寻址模式,因此能快速完成一系列精确的算术与逻辑运算。
DSC的主要特性
典型的DSC架构具备一些CPU和外设的特性,因而适用于众多汽车应用。在这一部分,我们将探讨这些 特性中最具优势的特性,它们是考虑使用DSC架构时,最令人关注的特性。
增强的CPU功能
16位DSC最强有力的功能可能就要属其强大的数学处理能力。一个真正的DSC包含两个40位累加器,可用来存储两个独立的16位×16位乘法运算的结果。
大多数信号处理算法以及许多一般数学计算,都包含有动态乘积和的计算。诸如MAC(乘-累加)等特殊指令能够在一个指令周期内,求得两个16位数的乘积,将结果添加到累加器,然后从RAM预取一对数据值。因为有两个累加器,这种架构还能在回写数据到一个累加器的同时在另一个累加器中执行计算。
40位宽的累加器允许数据暂时溢出(当在累加器中累加大量数值时,这种情况时有发生!)。此外,DSC的CPU还可选择将值保持在一个允许的范围内,这个范围由一种称为饱和的机制确定,在回写数据到RAM时,这种机制还将对数据进行舍入和调整。DSC还拥有MCU通常不具备的特性,那就是DSC有能力解析小数形式的数据而不总是将数据看作整数,这一特性有助于小数的算术运算。
除了上述特性以外,DSC架构还具有多种数据寻址模式,能够有效地传送数据、支持循环缓冲区和位反转寻址,以及零开销循环。很明显,DSC提供了一款非常有效且用户友好的CPU架构。DSC是处理和分析传感器数据、执行与控制各种执行机构相关的计算以及监视汽车系统性能的理想之选。






评论