基于MCX314芯片的多轴运动控制平台

摘 要:本文主要介绍了基于MCX314运动控制芯片搭建的运动控制平台。重点描述了芯片的寄存器及其命令方式,并阐述了系统能够实现的位置、速度、加速度等各种控制方式和直线、圆弧、位模式的插补方式,并给出了一个位模式插补方式实现的全过程。
关键词:数字脉冲接口;MCX314;硬件插补;位模式
引言
目前,运动控制主要通过单片机或者计算机实现,这种方法的软、硬件研制周期长,严重影响系统的性能和可靠性。本文介绍的数控系统采用的是硬件插补,缩短了软件设计周期。另外,原有的插补是根据给定的数学函数,在理想的轨迹或轮廓上的已知点之间确定中间点的一种方法,很难得到复杂的曲线方程,而MCX314中的位模式插补功能就能很好地解决这个问题。本文介绍的算法可以将复杂曲线用一种特殊格式的文件来表示,用位模式实现插补驱动。
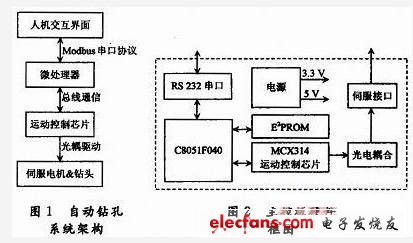
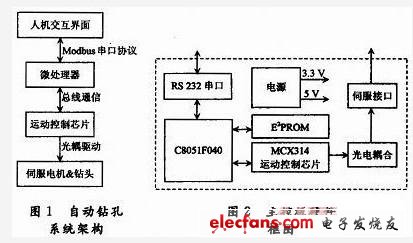
图1为基于MCX314芯片的4轴数控系统的硬件平台,系统的软件平台建立在它之上。此硬件平台通过ISA总线接口实现对4个轴运动的控制,可提供4通道全数字伺服接口和1通道12位的模拟输出(用于主轴控制), 其中每个轴都可以独立设定位置或者控制速度,另外还提供了64输入/48输出光电隔离接口。它的轴控制器包括脉冲输出接口、编码器输入接口和外部信号输入接口。脉冲输出接口直接与步进或数字伺服电机连接,控制电机运动;编码器输入接口接收来自电机上编码器的反馈数据,实现闭环控制。
使用MCX314的运动控制平台的优势
基于MCX314芯片的运动控制平台是一款全数字平台,因为它完全有别于以前的数控系统,以前的数控系统采用的是模拟信号输出,在系统内部,CPU以数字形式对信号进行处理,然后通过D/A转换输出模拟信号控制伺服电机运动,由输出的模拟信号的电平高低来控制电机转动的快慢。它采用的是脉冲形式输出,在整个处理与输出的过程中都采用数字信号,由输出脉冲的频率来控制电机转动的快慢,由输出脉冲的多少来控制电机转动多少。如图1所示,4轴控制器与电机之间交换的是数字信号,脉冲输出和编码器反馈都是高低电平形式,使用数字信号大大提高了系统的抗干扰性。
平台具有这样的优势是与MCX314芯片的特点分不开的。MCX314四轴运动控制芯片是基于DSP的运动控制专用芯片,接口简单、编程方便,在数控机床、雕刻机、工业机器人等领域得到广泛应用,并正在向新的应用领域拓展。MCX314芯片能与8位或者16位总线接口,通过命令、数据和状态等寄存器实现4轴3联动,实现位置、速度、加速度的运动控制和实时监控,该芯片具有3种模式插补功能,输出脉冲频率最高可达4MHz。每轴都有伺服反馈输入端、4个输入点和8个输出点、能独立地设置为恒速、线性或者S曲线加/减速控制方式,并有2个32位的逻辑、实际位置计数器和状态比较寄存器,实现位置的闭环控制。
平台有两项功能是最能体现它的灵活性和易操作性的,即它的硬件插补功能和位模式插补功能。所谓硬件插补,即不用编写复杂的插补程序,只需要设定一些参数和发出差补命令即可完成插补任务。
硬件插补功能
在硬件插补当中,不用考虑插补算法,只要给出参数以及插补命令,整个过程就能由芯片自动控制,不需要软件的任何干预。图2是硬件插补的应用流程。
本系统可以在4个轴中任意挑选出2个或者3个轴进行 直线插补、圆弧插补和位模式插补驱动,所以在进行插补驱动前应指定插补轴。
位模式插补功能
位模式插补是把CPU计算的插补数据以数据包的方式接收后,以指定的驱动速度连续输出插补脉冲。简单地说,位模式插补就是根据+/-方向驱动脉冲的高低电平状态来进行插补,每一位对应一个脉冲,随即驱动马达转动一步,如果马达转动一圈需要2048个脉冲,那么一个脉冲可使马达转动1/2048周。利用位模式差补方式可以加工出任意复杂形状的曲线。
图3为位模式插补的整个流程图,直观地介绍了位模式插补的整个过程,包括各个寄存器使用的时机,各种命令如何搭配使用来完成位模式插补的全过程。
算法实现
本文介绍的这个算法是将插补数据以一种特殊的格式放入一个文件中,算法根据数据的格式读取插补数据,进行插补驱动,插补驱动的过程如图3所示,在后面的流程中不作详解。插补数据根据二维/三维曲线的具体形状而形成。
1. 举例构建位模式插补数据结构文件如下:
Bitpattern.bp(文件名)文件数据如下:
BITPATTERN
AXIS 3 ——插补轴的指定
B ——数据有效,可以读取
0000 2bff ffd4 0000① ——插补数据
B
f6fe 0000 000f 3fc0
B
1fdb 0000 00ff fc00
B
4000 7ff5 0000 0aff
E ——后面无数据,文件结束
2. 位模式插补数据结构文件的格式介绍:
?BITPATTERN:表示此文件的格式为位模式数据文件。
?AXIS:表示插补轴。
?3:十六进制数(二进制0011),表示插补轴的设定,同时表示2轴位模式插补,第一轴X和第二轴Y,全部参数设定参见表1。
当程序从位模式数据文件中读到此数值时,则根据表1中的规定执行相应的函数子程序。
B:表示下面有一行有效的位模式插补数据,可以读取。
E:表示下面无数据,位模式插补数据结束,位模式数据文件结束。
其中的每行数据为十六进制数,表示插补数据,以①为例,“0000 2bff ffd4 0000”表示的分别是AX1轴正、负方向,AX2轴正、负方向的低16位数据。
结语
本文介绍的系统采用数字脉冲接口,处理的是数字信号,这在很大程度上提高了系统的抗干扰能力和可靠性,而且采用的是硬件插补方式,系统性能提高了,闭环处理的速度加快了,从而大大降低了数控软件的编写难度,缩短了开发周期。位模式插补方式解决了复杂曲线用公式难以描述的问题,文中介绍的算法巧妙地将复杂曲线转换成一种格式文件,充分发挥出位模式插补的优势。■
参考文献
1.The Data Book of MCX314, NOVA
2.叶佩青,汪劲松. MCX314运动控制芯片与数控系统设计. 北京:北京航空航天大学出版社,2002,11
3.毕承恩,丁乃建. 现代数控技术(上、下). 北京:机械工业出版社, 1991

伺服电机相关文章:伺服电机工作原理
加速度计相关文章:加速度计原理
评论