基于嵌入式ARMS3C2440的裂纹实时测量系统的设计

引 言
本文引用地址:https://www.eepw.com.cn/article/272367.htm在建筑业中,评价墙体裂纹,地面裂纹是评价房屋质量的一项重要指标。一个嵌入式系统装置一般都由嵌入式计算机系统和执行装置组成,嵌入式计算机系统是整个嵌入式系统的核心,由硬件层、中间层、系统软件层和应用软件层组成。执行装置也称为被控对象,它可以接受嵌入式计算机系统发出的控制命令,执行所规定的操作或任务。执行装置可以很简单,如手机上的一个微小型的电机,当手机处于震动接收状态时打开;也可以很复杂,如SONY 智能机器狗,上面集成了多个微小型控制电机和多种传感器,从而可以执行各种复杂的动作和感受各种状态信息。嵌入式系统硬件层的核心是嵌入式微处理器,嵌入式微处理器与通用CPU最大的不同在于嵌入式微处理器大多工作在为特定用户群所专用设计的系统中,它将通用CPU许多由板卡完成的任务集成在芯片内部,从而有利于嵌入式系统在设计时趋于小型化,同时还具有很高的效率和可靠性。
本研究将问题划分为以下两个部分:
(1)裂纹宽度测量算法;
(2)将以上所开发软件移植到ARM开发板,并优化算法提高软件运行速度。
1 裂纹宽度测量算法
计算裂缝宽度关键是要利用图像分割技术得到裂缝的真正边缘。虽然已有文献介绍了多种分割方法,但是未见有针对裂缝测试仪采集到的裂缝图像进行处理的方法。
1.1 图像获取
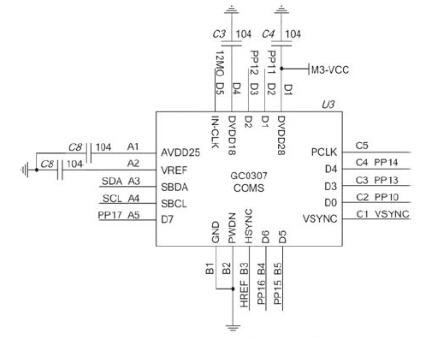
图像获取过程如图1所示:被检测的裂缝通过光学系统在CMOS图像传感器上成像,然后通过USB接口将裂缝图像输出到ARM上进行处理。ARM(Advanced RISC Machines)是微处理器行业的一家知名企业,设计了大量高性能、廉价、耗能低的RISC处理器、相关技术及软件。技术具有性能高、成本低和能耗省的特点。适用于多种领域,比如嵌入控制、消费/教育类多媒体、DSP和移动式应用等。

图像获取
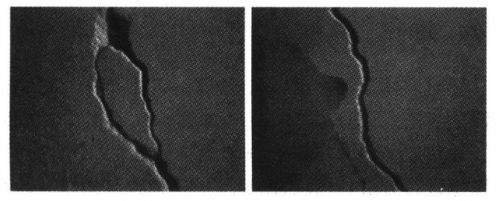
裂缝图像如图2所示。裂缝宽度分布范围较广,自几十至几百像素不等,但远远小于图像的宽度值。裂缝周围有部分噪声,有的图像含有大量污染区域,这成为裂缝位置锁定的难点。
裂缝图像
OTSU图像分割结果
1.2 OTSU图像分割
通过与已有图像分割方法如:直方图法、OTSU法、区域分割法等进行比较发现,OTSU在最后的效果上占有明显的优势。
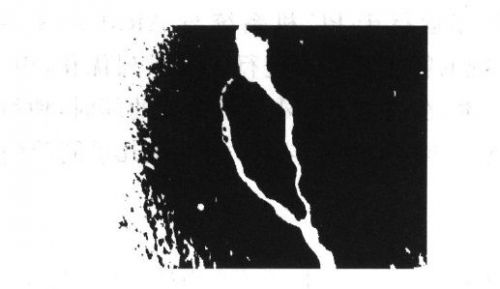
图像分割的结果如图3所示。观察结果,很容易发现图像的边缘很大区域被错分为与裂缝一样。于是直接计算裂缝宽度时会导致将错分的区域计算成裂缝。因此除了计算裂缝宽度外,对候选裂缝集合进行有效剔除是另一个重要任务。
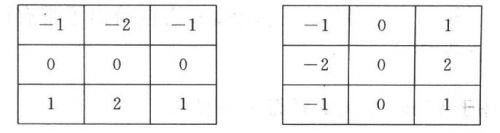
Sobel边缘检测算子
分割完图像后,计算所有可能成为裂缝的区域的宽度。采用从图像给定行的起始位置开始计算裂缝宽度,当发现像素灰度由0变为255,记为一个裂缝的左边缘起始位置;当查找到像素灰度由255变为0,记为一个裂缝的右边缘结束位置。通过这种方法可以获取给定行的所有可能的裂缝宽度。但是在具体试验中发现,计算对单行的裂缝进行宽度测量还是存在比较大的误差。于是采用求取给定行上下5行共10行的平均值的方法。
网线测试仪相关文章:网线测试仪原理


评论