基于NEC电子汽车仪表盘专用器件系列的解决方案

引言
本文引用地址:https://www.eepw.com.cn/article/271419.htm关于汽车仪表盘的专用芯片,中国汽车电子行业由于起步较晚,直到2004年前后,市场上仍然几乎没有专用于仪表盘的芯片。很多客户采用的表盘方案往往是一颗普通的芯片,一颗步进马达的驱动芯片以及一颗LCD的驱动芯片组成。对于具有较高安全性保障要求的汽车电子产品,这样的情况从极限温度和电磁抗干扰这两个方面来考量,只是一个没有专用的汽车级芯片情况下的无奈选择。
NEC电子从1995年开始向市场提供专业的系列芯片:CAN ASSPn。从最早的μPD780852到后来μPD780828(根据客户的需要,分别提供掩膜和flash版本的芯片)。本文以国内中、低端汽车仪表盘的系统构成为主要对象,介绍了基于NEC电子汽车仪表盘领域的专用芯片——μPD78F0822的系统设计。
在目前的中国市场中,一般中、低端的汽车仪表盘会有如下配置:
• 4个步进马达驱动的显示表:车速表、转速表、燃油表、水温表→通过0822芯片中集成的4个步进马达驱动来实 现对仪表指针的控制。
• LCD显示:大、小里程→通过0822芯片中集成的LCD驱 动可以实现最大136段的显示。
• 蜂鸣器→用于产生各类不同的报警声诸如:安全带未系、未锁车门等。
• 各个功能显示小灯→通过MCU的I/O口来实现对客户所 需要的报警灯的控制。
在系统设计中以这四个模块为主要对象,说明该方案的功能实现、资源利用以及控制方法。
系统设计
在NEC电子(中国)有限公司上海分公司设计的解决方案中,使用了CAN总线来实现数据的传送、对步进电机的驱动以及对信号灯的驱动等。当然,根据客户的不同需要,也可以提供线束的方案。图1是CAN3+Demo的系统框图以及该系统中用到的CAN3+微控制器外围模块。
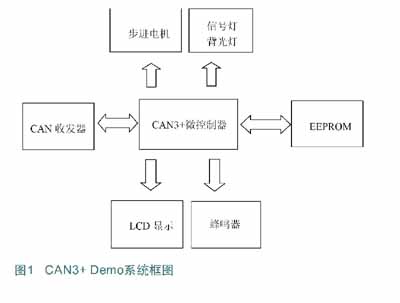
单片机接收由CAN总线发送来的数据,主要包括车速、转速、油位、温度、里程、损坏程度以及各种指示信号。单片机根据接收到数据的实际情况来驱动步进电机从而使指针到达指定的位置。如果汽车损坏大于设定的值,则由蜂鸣器发出报警信号。如果接收到指示信号,则点亮相应的背光指示灯。为防止里程丢失,在程序运行过程中及时保存里程值。
仪表盘从CAN总线接收到的数据是由另外一块Demo板提供的,该Demo板把采集到的与仪表盘相关的数据每隔10ms向仪表盘发送一次。
四个仪表的功能定义
1、车速表:采用步进电机驱动;车速最大量程为200km/h,最小分度为5km/h,车速信号从CAN总线传过来。车速表指针响应时间及时。当汽车速度平稳变化时,车速表指针运动平稳。在任一恒定速度下,指针摆动范围不超过1km/h。
2、转速表:采用步进电机驱动;转速最大量程为8000r/m,最小分度为200r/m,该信号从CAN总线传过来。转速表指针响应时间及时。当转速平稳变化时,转速表指针运动平稳。在恒定转速下,在任一恒定转速下,指针摆动范围在70r/m以内。
3、燃油表:采用步进电机驱动,信号从CAN总线传过来。指针表示燃油箱中估计的燃油量。
指示图上:E——燃油箱空;F——燃油箱满。
4、水温表:采用步进电机驱动,信号从CAN总线传过来。
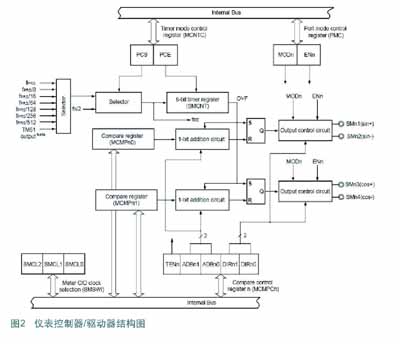
仪表控制器/驱动器
仪表控制器/驱动器可以驱动步进电机,从而控制外部仪表或者十字线圈。主要有以下几个功能:
• 可以设置8位精度的脉宽
• 具有1位附加功能的8+1位精度的脉宽
• 可以同时驱动4个360° 类型的步进电机
图2是仪表控制器/驱动器结构图。
步进电机的规格说明
所使用的步进电机的规格如下:
• 工作电压: 5V~10V
• 线圈电阻: 280Ω
• 消耗电流: 15mA
• 启动频率: 160Hz
• 最大驱动频率: 600Hz
蜂鸣器相关文章:蜂鸣器原理 漏电开关相关文章:漏电开关原理



评论