基于MC9S12XEP100的旋转磁场定向测距系统设计

摘要:针对传统基于地磁导向的连续测斜系统易受干扰以及惯性导航的陀螺测斜系统具有积分漂移误差,难以满足连通井导向定位高精度测量的需求,提出一种基于旋转磁场闭环定向测距的系统方案,完成了该系统的硬件电路设计、软件设计以及远距离通讯协议设计,并进行了地面实验。该测距系统由地面系统和井下系统组成;其中,井下系统用于数据的采集、地面系统用于数据接收和命令传输,系统之间数据采用曼切斯特码传输以提高精度降低误码率。试验表明,在钻头靠近目标井70m,可检测到有效信号;在50m范围内,可以控制测量精度在5%。
本文引用地址:https://www.eepw.com.cn/article/248895.htm引言
随着石油勘探技术的不断发展和复杂井的广泛应用,地层结构变得越来越复杂[1]。作为复杂井重要支撑技术之一——随钻测量,在复杂的地层结构中受到国内外钻井行业的高度关注。随钻测量系统中井眼轨迹的控制精度直接关系到连通井井眼对接的成败,而控制井眼轨迹的关键在于井眼运动轨迹的高精度测量[2]。但是,传统单一井眼进行轨迹预测的随钻测量设备难以满足时下复杂地层中高精度、强抗干扰的要求[3-4]。
为了减小连通井中井眼连通定位误差,进一步提高测量精度,需要研究作业井与目标井导向定位的新方法。国内外先后开展了其方法的研究,一方面,论证了静态磁场模型难以直接用于精确定位[5-6]以及开环系统在测量过程中具有一定的累积误差[7];另一方面,对于闭环动态旋转磁场测量方法:A.F.Kuckes[8]等人提出了基于旋转磁场测距系统(RMRS),论证其在50m范围内具有较好的效果;胡汉月、宗艳波、AI-Khodhori[9-11]等人验证了该方法用于水平井的对接连通的可行性等。
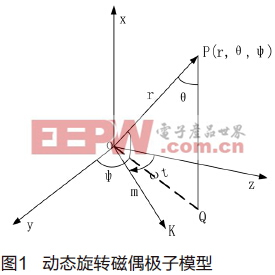
因此,为了测量作业井与目标井的相对位置和相对角度,提出了一种基于旋转磁场定向测距的方案。通过建立基于动态旋转磁偶极子模型,完成了井下测量和井上通讯的硬件电路的设计以及上下板之间的通讯协议和软件的开发。最后,通过地面实验验证该方案的可行性。
1 磁测距系统原理
连通井旋转磁场导向测距系统由地面系统和井下系统组成。其中,地面系统包括地面软件与上位机、测井绞车;井下系统分为磁工装和磁测量装置。磁工装用于产生一个交变磁场源;磁测量装置用于获取在作业井钻头处的磁场,测量信号借助测井绞车通过电缆传输到地面进行解码处理;最后,传输到上位机进行相关运算处理,得到距离和角度。







评论