满足安全/带宽需求的车载网络设计

Versluij还指出,FlexRay在元器件级别的实现成本要超过CAN。“但在系统级,情况则不一样。” Mentor Graphics的系统工程事业部的总经理Serg Leef认为,“CAN在带宽和可靠性方面具有很大的局限性。为对此进行补偿,工程师在设计网络时只使用总带宽的很少一部分,以便提高消息能及时到达的可能性,但这也降低了CAN的性价比。”
NEC电子美国公司等IC制造商正在继续更新其智能传感器和高级控制器的汽车产品线,以支持所有的流行的车载网络,如FlexRay、CAN、LIN、MOST、USB和以太网。德州仪器(TI)公司也提供支持FlexRay、CAN和LIN的芯片。
“我们为这些网络提供集成在收发器内的标准单元和内核。”TI公司模拟/混合信号部门的系统工程师Scott Monroe表示。他指出,虽然CAN在车内的用量有很大增长,但需要将那些非紧急的CAN节点与安全关键性节点分开。
MCU也被大量用于FlexRay网络。飞思卡尔半导体的S12XF MCU就是一个例子。这个MCU包含了集成式FlexRay技术。Adura Systems公司在模块化电子可扩展架构(MESA)传动系统中选用了这款IC。MESA传动系统提供高达100英里的纯电动汽车驱动技术。
汽车内的MCU(经常被用作电子控制单元(ECU))的数量越来越多,这不仅增加了成本,而且这些MCU提供的过多控制功能不断增加了复杂性。今后的发展趋势是采用模块化的控制单元,每个模块控制车载网络中汽车功能的一个特定子集。设计师正在试图将车内典型的35至40个MCU(有的车型甚至有多达100个MCU)精简到20至25个集成相同功能的单元。然而,对那些具有许多ECU的高级设计来说,CAN可能会达到其极限。
对汽车来说高等级的决断和实时响应需求非常关键。告警系统问题是在检测往前开的汽车在直行或变更车道时是否在车道内或车道外时发生的。汽车防撞告警系统必须能在高速条件下实时工作,并使用多个低成本传感器测量复杂的三维场景。
种类繁多的CAN
市场上有许多版本的CAN协议。CAN在车上的使用最早可追溯到1994年。最流行的三种版本分别是容错CAN(FT-CAN)、高速CAN(HS CAN)和单线CAN(SW-CAN)。所有CAN都用于车门、天窗、仪表板、温度控制等自动车身控制功能。HS-CAN还用于传动系应用,包括引擎、传动和变速箱以及防抱死刹车系统(ABS)。
另外一种CAN是时间触发式CAN(TT-CAN)。然而,许多人对TT-CAN抱怀疑态度,主要原因是TT-CAN线缆长度很有限。带宽在1Mbps时最大长度只有40米,因此只能局限于短距离应用。
“当你忽略CAN协议的优点而把它用于较长的线路长度时,那它就不是CAN了。”CAN协议最早开发人员之一、CC Group公司首席执行官Wolfhard Lawrence表示。目前他专业从事汽车软件、系统和网络的测试工作。
CAN协议具有较大而且可变的抖动。为了使TT-CAN更可预测和更加可靠,美国凯特灵大学的研究人员Juan R.Pimentel和Mentor Graphics公司的Jason Paskvan做了各种试验,以表征基于实际CAN的通信架构中的抖动特性。他们提出了一种更具确定性的FlexCAN,这是一种用于线传控制应用的拓扑,不会降低灵活性(图4)。
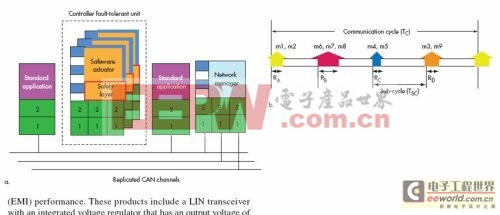
图4:FlexCAN是一种用于线传控制应用的拓扑,不会降低灵活性。
寻找最佳平衡点
Delphi公司的B.Perry Compton提出了一种串行通信协议,这种协能够在CAN和FlexRay之间达到开销、复杂性、吞吐量、成本和实时性能的最佳平衡。Compton将他的协议称为“Goldilocks”,并指出,这不是单个协议,而是基于单个消息调度原理的协议集(图5)。
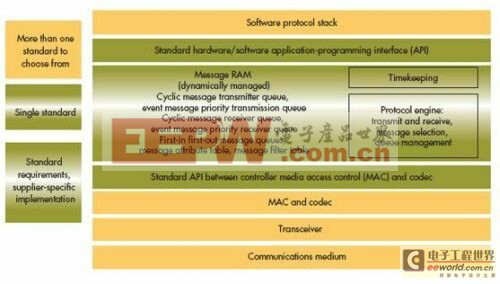
图5:Goldilocks控制器试图在开销、复杂性、吞吐量、成本和实时性能之间取得最佳“平衡点”。Goldilocks后向兼容CAN车载网络协议,在性能和功能方面与FlexRay车载网络协议相比极具竞争力。(来源:Dephi Automotive公司)








评论