CAN总线在基于DSP 的逆变器并联运行控制中的应用
扩展帧的结构为图2 所示。CAN 协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码。采用这种方法的优点是可以使网络内的节点数在实际应用中几乎不用考虑;数据块的标识符可以由11位或29位二进制数组成,因此可以定义211或229个不同的数据块。这种按数据块编码的方式,还可以使不同的节点接收到相同的数据,这一点在分布式控制系统中非常有用。

图2 扩展帧的结构
总之,CAN总线由于其卓越的特性、极高的可靠性和独特的设计,特别适合工业工程监控设备的互连,因此,越来越受到工业界的重视,并已成为公认的最有前途的现场总线之一。
3 基于DSP 的逆变器并联运行控制器中的CAN通信应用
我们以TI 公司的数字信号处理器DSP TMS320LF2407A 为核心设计制作了逆变器并联运行控制器,采用了“基于抢占与并发的同步控制方式”,利用CAN总线在各逆变器之间进行数据通信,传递各模块的模块号和输出电流有效值,然后各模块计算出单个模块的理想输出电流值,再根据自己的实际输出值与理想值之间的误差来调节模块输出电压的大小,从而实现均流控制。我们称这种方法为“直接电流均流法”。
3. 1 DSP TMS320LF2407A 的CAN模块简介
TMS320LF2407A 是德州仪器公司TI 的一种16 位定点数字信号处理器。它在芯片里集成了几种先进的外设,包括事件管理器、模数转换器、串行外设接口、串行通信接口和CAN 控制器等,成为真正的单芯片控制器。
该DSP 中内嵌的CAN 控制器模块是一个完整的、完全支持CAN2.0B协议的CAN控制器。它集成了CAN协议的物理层和数据链路层功能,可以完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等工作。它具有6个邮箱,每个邮箱的数据长度为0~8个字节。这6个邮箱中2个为接收邮箱,2个为发送邮箱,还有2个可以配置为接收或者发送邮箱;每个接收邮箱都设有局部接收屏蔽寄存器用以控制对总线上的数据进行有选择的接收;有可编程的位定时器,用以确定数据的传输速率;有可编程的CAN总线唤醒功能;具有自动回复远程请求的功能;当发送出现错误或仲裁中丢失数据的时候,CAN控制器模块具有自动重发的功能;此外,它还有总线错误诊断功能;有可以编程配置的中断系统。它的应用也非常简单,只要在初始化时按照设计好的工作方式和工作参数设置相应的控制寄存器,然后在程序中需要发送数据地方把数据写到某个发送邮箱,再把发送控制位置位,即可完成数据输出;数据输入可以采用中断方式实现。
3. 2 系统的硬件结构
系统的硬件结构如图3所示。图3中只画出了一个单元的结构, 不同单元之间通过同步母线、CAN 总线和交流输出母线连接起来。
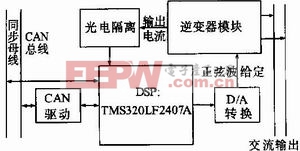
图3 系统硬件结构图
在每个单元中,逆变器输出电流的检测信号经过线性光隔进行光电隔离后进入DSP,在数据采集中断服务程序控制下,经内部的10位A/D转换器转换成数字量,用于计算电流有效值;DSP按照控制算法输出具有一定相位和幅值的正弦波数字量,经过D/A 转换,变换成模拟信号送给逆变器作为SPWM调制的基准信号。DSP的CAN模块通过外接的驱动器连到总线上,与其它单元通讯。
3. 3 软件结构
本系统的软件结构如图4 所示。主程序在完成初始化后就打开中断。在同步中断服务程序中进行同步处理,在数据采集中断服务程序中进行数据采集和正弦波给定输出(同步以后) 。当一个周期结束以后,就计算出此周期的电流有效值,并通过CAN总线发送给其它模块。不同单元的数据通过模块号予以区别。然后再按照控制策略进行数据通信和均流控制,进入下一个周期。数据采集利用定时器中断进行定时,在每个交流电周期的256个固定点上对输出电流进行采样,供主程序中计算有效值使用;然后根据同步是否正常确定是否输出正弦波给定。在CAN 中断接收服务程序中,把接收到的数据按照不同单元的模块号存放到一张模块数据表中的相应位置,供主程序计算时使用。
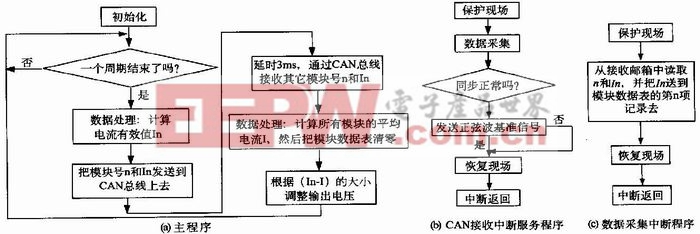
图4 系统软件流程图
4 结 论
我们采用“基于抢占与并发的同步控制方式”和“直接电流均流法”的控制策略,利用DSP 内嵌的CAN 控制器模块实现不同逆变器之间的数据通信,开发制作了DSP控制器,并分别进行了2台和3台单相3kVA 逆变器的并联实验。实验证明:不论是在纯阻性负载或者是带有电抗性的负载,或者是整流性负载的情况下,都可以有效地抑制环流,较好地实现了负载的均分。实验结果表明:这种方法是有效和可靠的。











评论